MAVSlam Save
Visual odometry based on Intel® RealSense™ devices
Project README
MAVSlam - Visual odometry & SLAM for PX4
Onboard visual odometry for PX4
(Deprecated)
Integrate Intel® RealSense™ R200 depth camera as an oboard visual input source for PX4 using the UP-Board as companion:
- Estimate position and speed based on stereo depth images up to 60 fps for LPE /EKF2
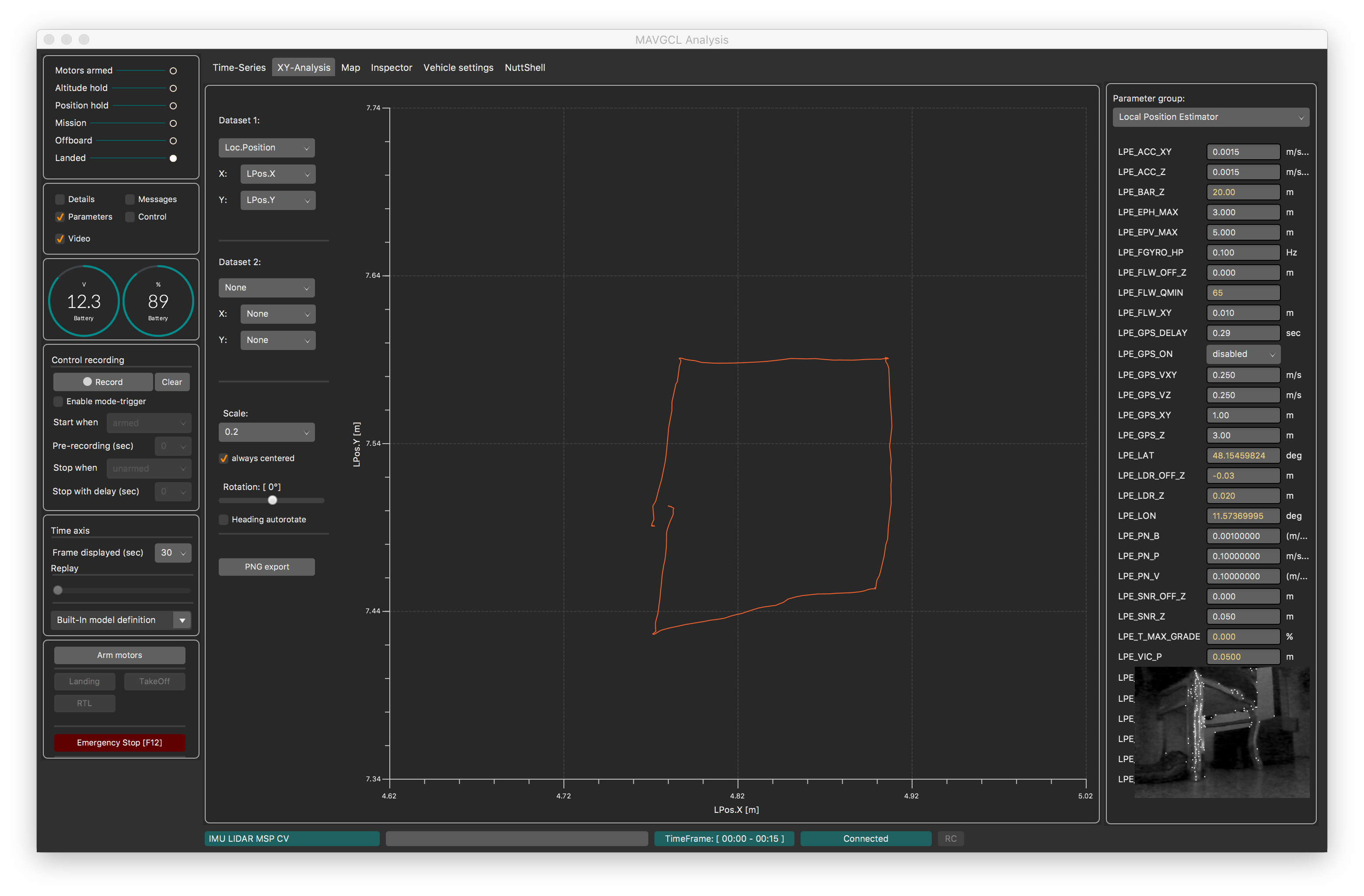
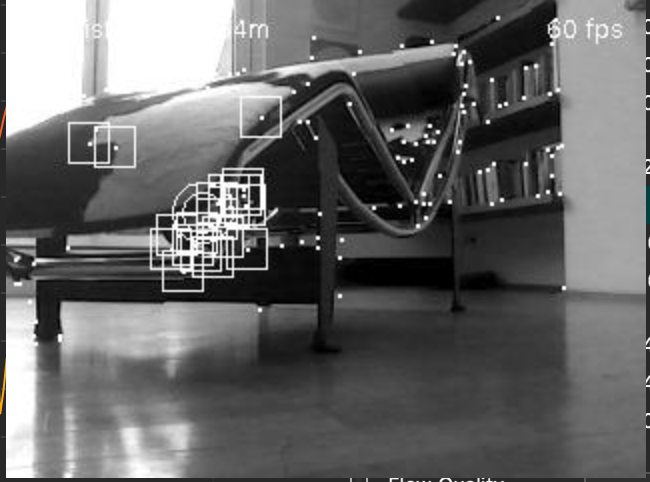
- Stream video to MAVGCL with overlays
- Feature-based or depth obstacle detection
- Integration with PX4 via MAVLink (MAVComm required)
Prerequisites:
- UP-Board running Ubilinux 3.0 with Java 8 (minimum) stack connected via serial link to PX4 controller
- Intel® RealSense™ R200 (connected with external power supply)
Video:
Heading estimation:

XY Estimation:
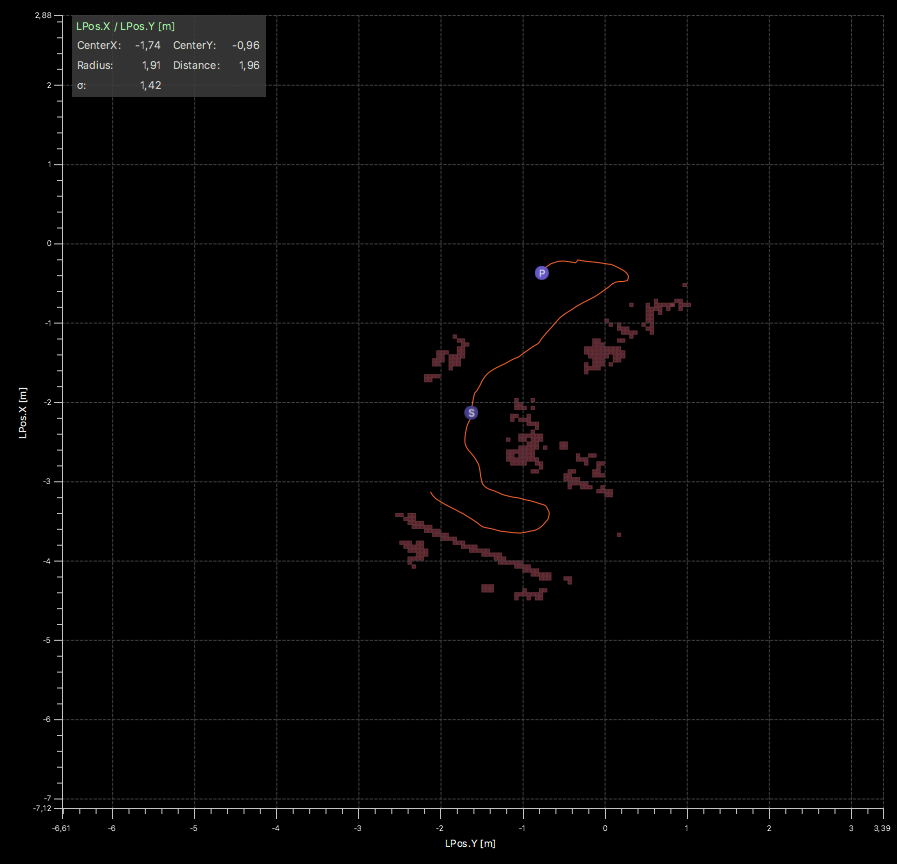
Obstacle detection:
MicroSLAM:
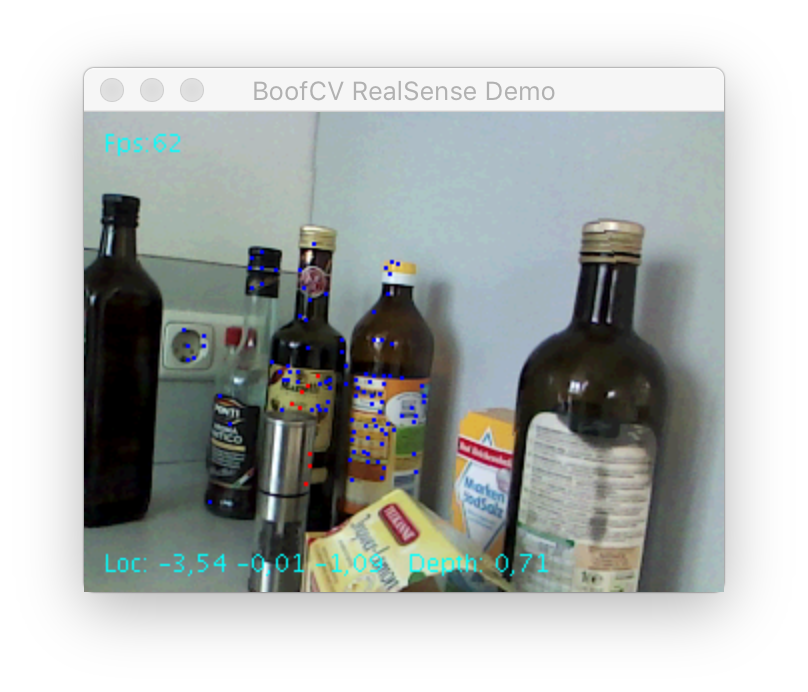
Desktop odometry demo
A first implementation using Intel® RealSense™ R200 with boofcv on OSX/Linux platforms. Based on https://github.com/IntelRealSense/librealsense and http://boofcv.org/index.php?title=Main_Page.
Open Source Agenda is not affiliated with "MAVSlam" Project. README Source: ecmnet/MAVSlam
Stars
50
Open Issues
4
Last Commit
4 years ago
Repository
