Aerial Mapper Save Abandoned
Real-time Dense Point Cloud, Digital Surface Map (DSM) and (Ortho-)Mosaic Generation for UAVs
Project README
aerial-mapper
Overview
- Load camera poses from different formats (such as PIX4D, COLMAP)
- Generates a dense point cloud from raw images, camera poses and camera intrinsics
- Generates Digital Surface Models (DSMs) from raw point clouds and exports e.g. to GeoTiff format
- Different methods to generate (ortho-)mosaics from raw images, camera poses and camera intrinsics
Package Overview
- aerial_mapper: Meta package
- aerial_mapper_demos: Sample executables.
- aerial_mapper_dense_pcl: Dense point cloud generation using planar rectification.
- aerial_mapper_dsm: Digitial Surface Map/Model generation.
- aerial_mapper_google_maps_api: Wrapper package for Google Maps API.
- aerial_mapper_grid_map: Wrapper package for grid_map.
- aerial_mapper_io: Input/Output handler that reads/writes poses, intrinsics, point clouds, GeoTiffs etc.
- aerial_mapper_ortho: Different methods for (ortho-)mosaic generation.
- aerial_mapper_thirdparty: Package containing thirdparty code.
- aerial_mapper_utils: Package for common utility functions.
Getting started
Output samples
| Dense point cloud (from virtual stereo pair, 2 images) |
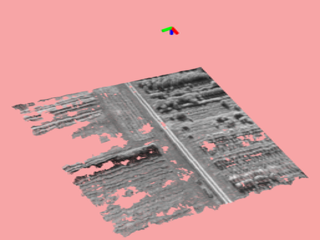
Digital Surface Map (DSM, exported as GeoTiff) |
(Ortho-)Mosaic (from homography, 249 images) |
|---|---|---|
 |
 |
 |
| Raw images | Dense point cloud | Digital Surface Map |
|---|---|---|
 |
 |
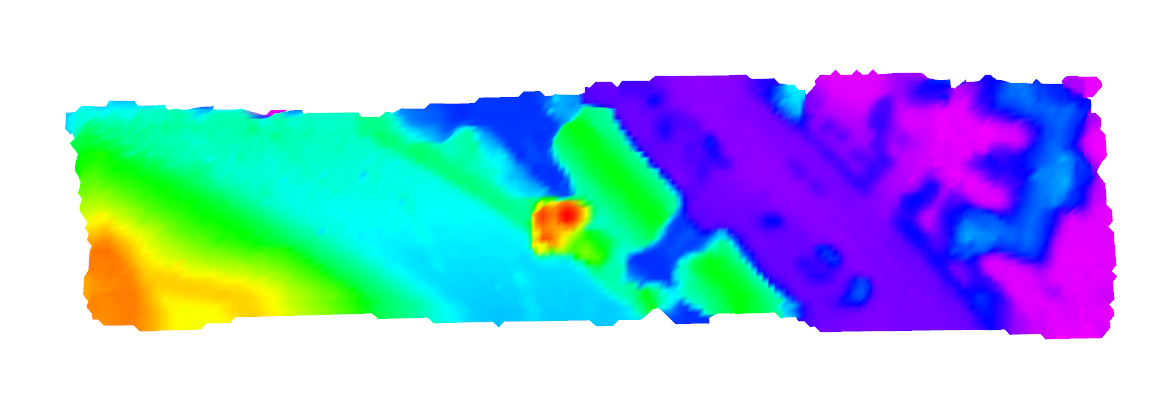 |
| Observation Angle (red: nadir) |
Grid-based Orthomosaic (Cell resolution: 0.5m) |
Textured DSM |
 |
 |
 |
Publications
If you use this work in an academic context, please cite the following publication:
T. Hinzmann, J. L. Schönberger, M. Pollefeys, and R. Siegwart, "Mapping on the Fly: Real-time 3D Dense Reconstruction, Digital Surface Map and Incremental Orthomosaic Generation for Unmanned Aerial Vehicles" [PDF]
@INPROCEEDINGS{fsr_hinzmann_2017,
Author = {T. Hinzmann, J. L. Schönberger, M. Pollefeys, and R. Siegwart},
Title = {Mapping on the Fly: Real-time 3D Dense Reconstruction, Digital Surface Map and Incremental Orthomosaic Generation for Unmanned Aerial Vehicles},
Booktitle = {Field and Service Robotics - Results of the 11th International Conference},
Year = {2017}
}
Acknowledgment
This work was partially funded by the European FP7 project SHERPA (FP7-600958) and the Federal office armasuisse Science and Technology under project number 050-45. Furthermore, the authors wish to thank Lucas P. Teixeira from the Vision for Robotics Lab at ETH Zurich for sharing scripts that bridge the gap between Blender and Gazebo.
Open Source Agenda is not affiliated with "Aerial Mapper" Project. README Source: ethz-asl/aerial_mapper
Stars
526
Open Issues
7
Last Commit
3 years ago
License
