YyccR Location Save
Smartphone navigation positionning, fusion GPS and IMU sensors.
LOCATION

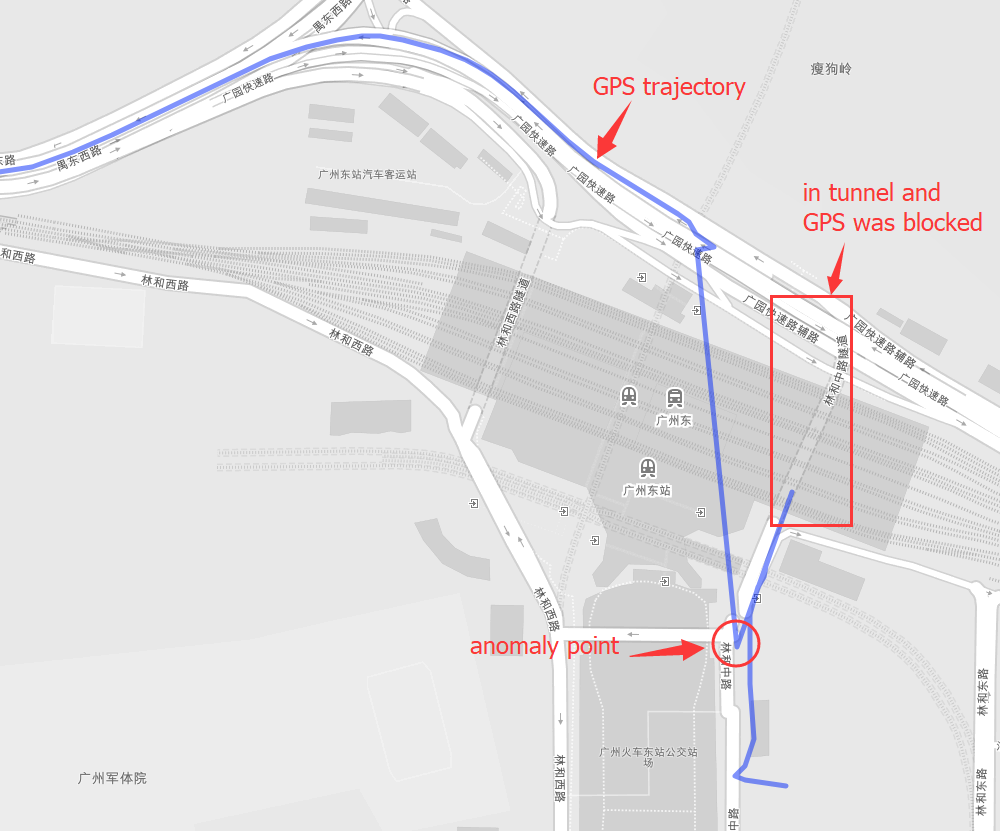
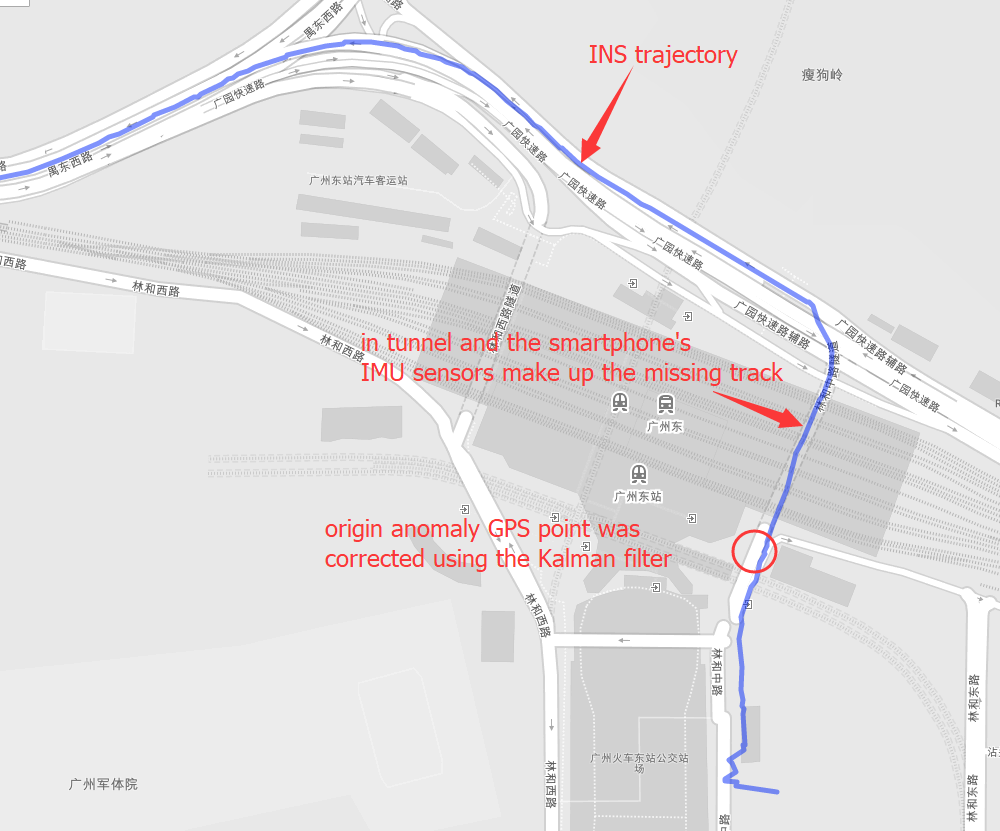
Positioning is the most basic and crucial step in the driving navigation. An accurate positioning can effectively improve the accuracy of the road-binding, and can also sense the change of the driving pattern more accurately. Since the project is mainly based on mobile phones for navigation and positioning, Currently used is the built-in sensor data (gyroscope, accelerometer, geomagnetic meter, direction sensor, gravity sensor) and GPS data fusion positioning.
Sensor data required.
- gyroscope(x, y, z).
- accelerometer(x, y, z).
- geomagnetic meter(x, y, z).
- gravity sensor(x, y, z).
- direction sensor(roll, pitch, yaw).
- compass(degree).
- road info(distance to next cross, bearing, road type).
- GPS(lng, lat, alt, accuracy, speed, bearing, t).
Some implement details
- sensor data filter.
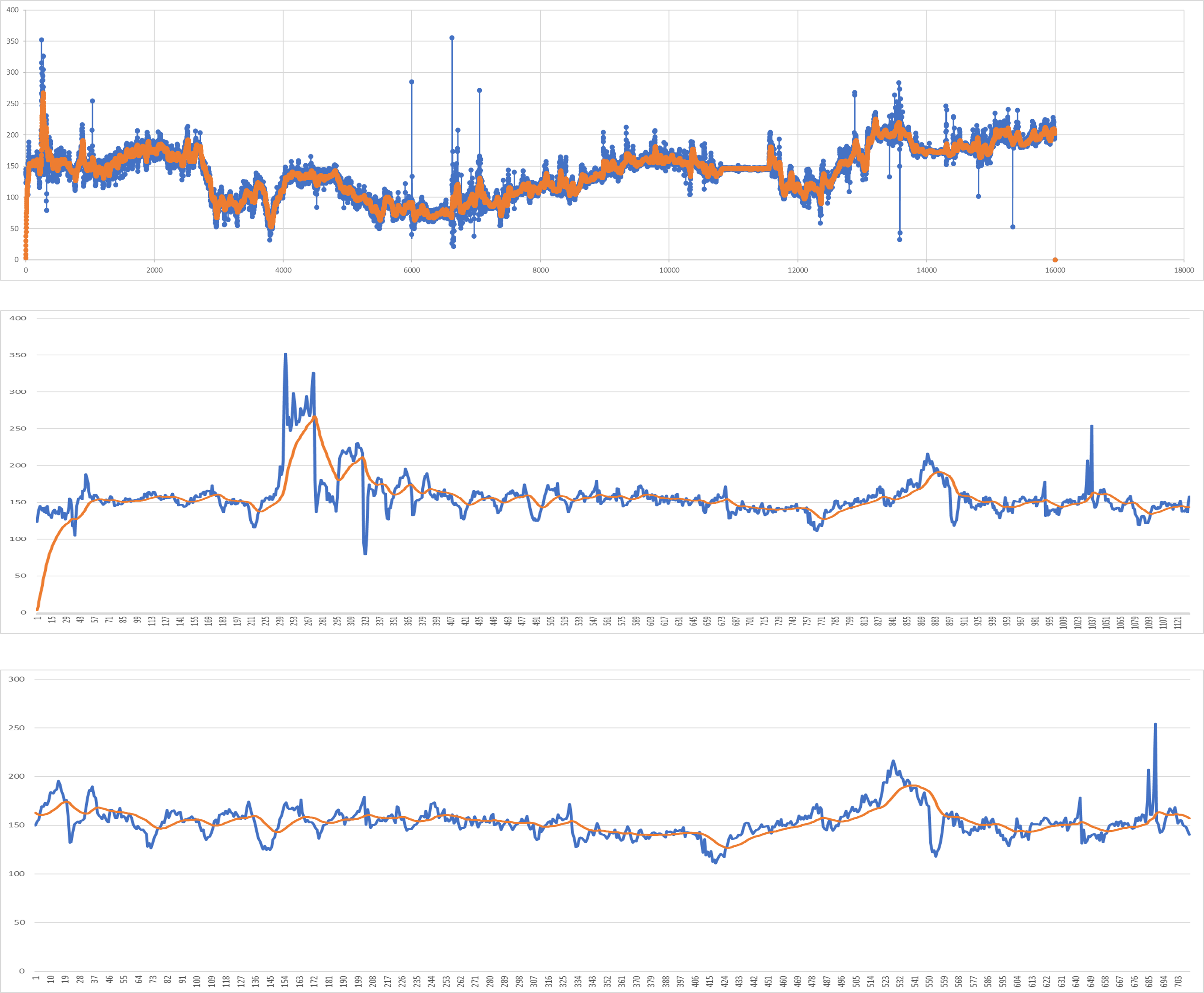
- GPS fusion INS under uncoupling system.
Quick start
First make sure gcc and cmake was installed, and include this library into your project.
git clone https://github.com/yyccR/Location.git
Second open your CMakeLists.txt and add these:
include_directories(${PROJECT_SOURCE_DIR}/Location/include/eigen3)
include_directories(${PROJECT_SOURCE_DIR}/Location/math)
add_subdirectory(Location/math)
include_directories(${PROJECT_SOURCE_DIR}/Location/models)
add_subdirectory(Location/models)
include_directories(${PROJECT_SOURCE_DIR}/Location/location)
add_subdirectory(Location/location)
include_directories(${PROJECT_SOURCE_DIR}/Location/sensor)
add_subdirectory(Location/sensor)
include_directories(${PROJECT_SOURCE_DIR}/Location/system)
add_subdirectory(Location/system)
target_link_libraries(${PROJECT_NAME} Location_math)
target_link_libraries(${PROJECT_NAME} Location_models)
target_link_libraries(${PROJECT_NAME} Location_location)
target_link_libraries(${PROJECT_NAME} Location_sensor)
target_link_libraries(${PROJECT_NAME} Location_system)
target_link_libraries(${PROJECT_NAME} Location_test)
final open your main file, and add the test code.
#include <iomanip>
#include <Eigen/Dense>
#include "sensor/GPS.h"
#include "location/Location.h"
using namespace Eigen;
using namespace std;
int main() {
Location location;
Vector3d gyro_data_v(0.004263,0.019169,-0.001014);
Vector3d mag_data_v(-2.313675,-82.446960,-366.183838);
Vector3d acc_data_v(0.105081,0.108075,9.774973);
VectorXd gps_data_v(7);
gps_data_v << 114.174118,22.283789,0.0,0.0,24.0,0.0,1554348968704.665039;
Vector3d g_data_v(0.094139, 0.107857,9.808955);
Vector3d ornt_data_v(-0.549866,0.629957,-0.069398);
Vector3d road_data(1000.0, 0.0, 0);
location.PredictCurrentPosition(gyro_data_v,acc_data_v,mag_data_v,gps_data_v,g_data_v,ornt_data_v, road_data);
cout << location.GetGNSSINS().lng << " " << location.GetGNSSINS().lat << endl;
return 0;
}
if you see the output 114.174 22.2838 that means this library was embedded to your project successfully.
Input data format.
-
gyroscope(x, y, z), origin gyroscope data, unit rad/s
-
accelerometer(x, y, z), origin accelerometer data, unit m/s²
-
geomagnetic meter(x, y, z), origin geomagnetic data, unit μt
-
gravity sensor(x, y, z), origin gravity data, unit m/s²
-
direction sensor(roll, pitch, yaw), origin sensor data, unit degree
Note that direction sensor doesn't exit actually , the 'sensor data' is computation result from system underlying algorithm.
-
compass(degree), origin sensor data, unit degree
-
road info(distance to next cross, bearing, road type)
This data is from map data, and if you couldn't search map server data, just fill in all zero (0.0, 0.0, 0.0)
- GPS(lng, lat, alt, accuracy, speed, bearing, t)
- lng, longitude, double
- lat, latitude, double
- alt, altitude, double
- accuracy, double
- speed, double
- bearing, double, unit degree
- t, timestampe, unit millisecond
More detail tutorial.
- Api calls details
- Sensor data checking
- Impelement details
- Sensor calibration
- Training Stop detection model
TODO
- improve CMake.
- Clean the garbage code.
- Template processing.
- Using smart pointer instead.
- Complete all kinds of documents.
- Add quick start.
- Add more test case.
- Design a suitable pattern.
reference:
- 《惯性导航》秦永元
- 《捷联惯性导航技术(第2版 译本)》译者:张天光/王秀萍/王丽霞 作者:DavidH.Titte
- An efficient orientation filter for inertial and inertial/magnetic sensor arrays
- Estimation of IMU and MARG orientation using a gradient descent algorithm
- Direction Cosine Matrix IMU Theory
- METHODS FOR NON-LINEAR LEAST SQUARES PROBLEMS
- A Calibration Algorithm for Microelectromechanical Systems Accelerometers in Inertial Navigation Sensors
- A Calibration Method of Three-axis Magnetic Sensor Based on Ellipsoid Fitting
- Accuracy Improvement of Low Cost INS/GPS for Land Applications
- Trajectory preprocessing: Computing with Spatial Trajectories
