Semodepth Save
Semi-supervised monocular depth map prediction
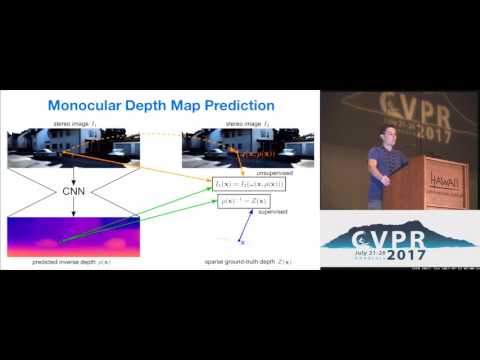
Semi-Supervised Deep Learning for Monocular Depth Map Prediction
This repository contains code for the depth estimation system as described in Semi-Supervised Deep Learning for Monocular Depth Map Prediction, CVPR 2017
By Yevhen Kuznietsov, Jörg Stückler, Bastian Leibe at Computer Vision Group, RWTH Aachen University
Presentation video
Prerequisite
In order to run the code, your setup has to meet the following requirements (tested versions in parentheses. Other versions might work as well):
- Python (2.7.14)
- SciPy (1.0.0)
- TensorFlow (1.4.0)
- CUDA (9.1.x)
- cuDNN (7.0.x)
- GPU compatible with CUDAv9.1
Running the system
- Download network model here
- Create a file, containing input-output file paths in each line. The format to be used for each line is
input_path/input.png,output_path/output.mat. Example can be found at filenames.txt - Edit the config file, set all the paths.
- Run the system:
python %PROJ_DIR%/inference/produce_predictions.py
Remarks
-
While the model may work with other datasets, this code is only supposed to be run with input resolution of KITTI dataset
-
The code was tested with 6GB NVIDIA GeForce GTX 980 Ti. It should also be possible to run it with less GPU RAM. Running on CPU may require code modifications.
-
The metric depth map predictions, as well as the inputs and the generated depth ground truth for 'Eigen' test set are available here
If you have any issues or questions about the code, you can contact me or my alter ego
Citing
If you find the depth estimation model useful in your research, please consider citing:
@InProceedings{Kuznietsov_2017_CVPR,
author = {Kuznietsov, Yevhen and Stuckler, Jorg and Leibe, Bastian},
title = {Semi-Supervised Deep Learning for Monocular Depth Map Prediction},
booktitle = {The IEEE Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {July},
year = {2017}
}
