Rlqp Save
Accelerating Quadratic Optimization with Reinforcement Learning
RLQP: Accelerating Quadratic Optimization with RL
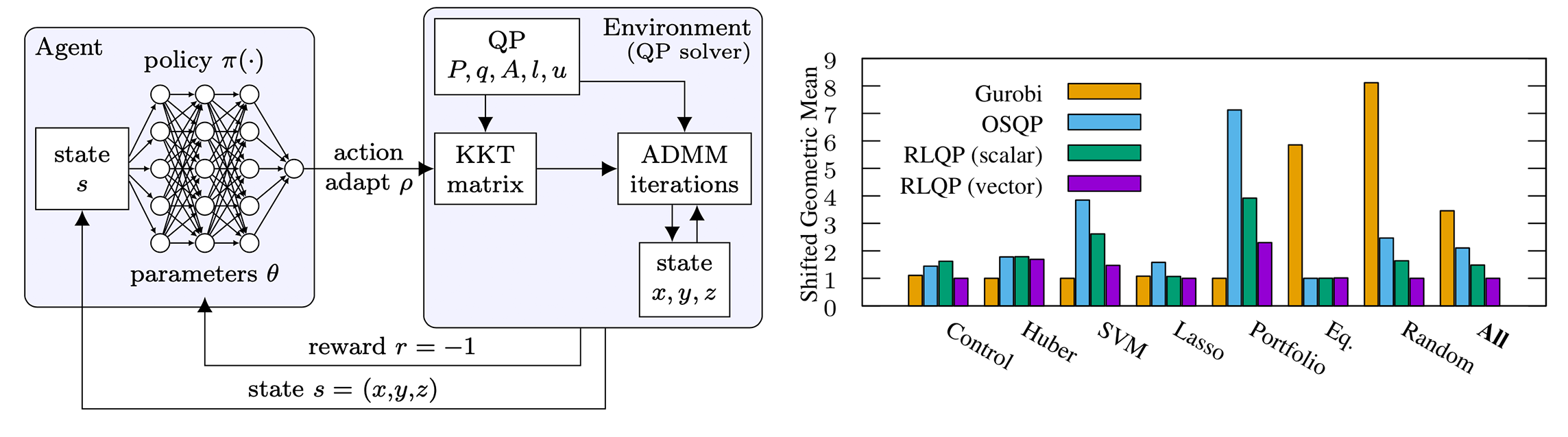
We demonstrate reinforcement learning can significantly accelerate first-order optimization, outperforming state-of-the-art solvers by up to 3x. RLQP avoids suboptimal heuristics within solvers by tuning the internal parameters of the ADMM algorithm. By decomposing the policy as a multi-agent partially observed problem, RLQP adapts to unseen problem classes and to larger problems than seen during training.
Getting Started
RLQP is composed of a few submodules, namely to (a) train the RL policy on a specific class of problems (source in rlqp_train/) and (b) evaluate the policy on a test problem. Most users will want to start by using RLQP's policy to accelerate optimization of their problems.
Prerequisites
Installation (evaluation)
To install the Python package to evaluate a pre-trained policy, run:
pip install git+https://github.com/berkeleyautomation/rlqp-python.git@55f378e496979bd00e84cea4583ac37bfaa571a9
This package contains a pre-trained model which should improve convergence beyond OSQP. The interface is identical to OSQP.
Installation (training)
Please follow the instructions in the rlqp_train/ directory to setup and run training code. This code is still in preview mode as we work to release features like our TD3 policy.
Citation
@article{ichnowski2021rlqp,
title={Accelerating Quadratic Optimization with Reinforcement Learning},
author={Jeffrey Ichnowski, Paras Jain, Bartolomeo Stellato,
and Goran Banjac, Michael Luo, Francesco Borrelli
and Joseph E. Gonzalez, Ion Stoica, Ken Goldberg},
year={2021},
journal={arXiv preprint}
}
