Inav Versions Save
INAV: Navigation-enabled flight control software
7.1.0
1 month ago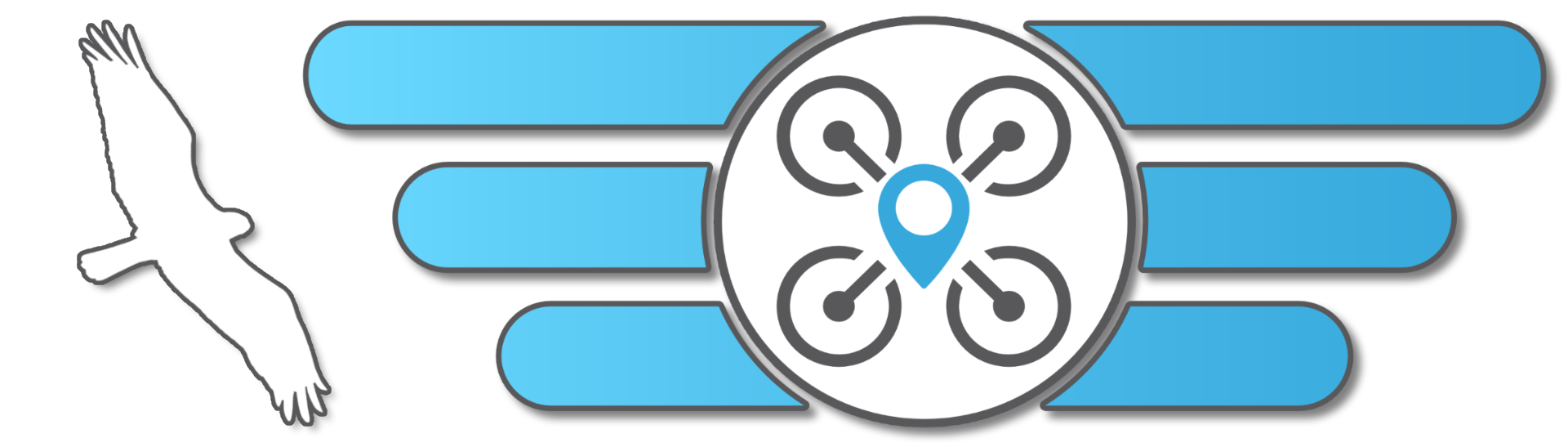
Hello and welcome to INAV 7.1 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
PosHold, Navigation and RTH without compass PSA
Attention all drone pilots and enthusiasts,
Are you ready to take your flights to new heights with INAV 7.1? We've got some important information to share with you.
INAV 7.1 brings an exciting update to navigation capabilities. Now, you can soar through the skies, navigate waypoints, and even return to home without relying on a compass. Yes, you heard that right! But before you launch into the air, there's something crucial to consider.
While INAV 7.1 may not require a compass for basic navigation functions, we strongly advise you to install one for optimal flight performance. Here's why:
🛰️ Better Flight Precision: A compass provides essential data for accurate navigation, ensuring smoother and more precise flight paths.
🌐 Enhanced Reliability: With a compass onboard, your drone can maintain stability even in challenging environments, low speeds and strong wind.
🚀 Minimize Risks: Although INAV 7.1 can get you where you need to go without a compass, flying without one may result in a bumpier ride and increased risk of drift or inaccurate positioning.
Remember, safety and efficiency are paramount when operating drones. By installing a compass, you're not just enhancing your flight experience, but also prioritizing safety for yourself and those around you.
So, before you take off on your next adventure, make sure to equip your drone with a compass. It's the smart choice for smoother flights and better navigation.
Fly safe, fly smart with INAV 7.1 and a compass by your side!
Currently, if you wish to fly a multirotor without a compass. You will need to enable a compass (fake is ok) to change navigational modes in Configurator. You should disable the compass after making the changes. This has been fixed for a future release.
Note: You must remove the compass (including FAKE) to enable MR compass-free navigation flight. This will remove the visualisation of the modes from the 7.1.0 Configurator. However, as long as the modes were saved, they available in the flight controller and can be verified in the CLI aux section.
Upgrading from a previous release
Upgrading from INAV 7.0
- Backup configuration with CLI
diff allcommand - Download and install the new INAV Configurator 7.1
- Flash INAV 7.1 WITH Full Chip Erase option enabled
- Select Keep current settings from the defaults pop-up
- Go to CLI and restore your 7.0 diff
- Done
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Fixed wing Autoland with landing pattern
INAV supports advanced automatic landings for fixed wing aircraft from version 7.1. The procedure is based on landings for man-carrying aircraft, so that safe landings at a specific location are possible. Supported are landings at Safehome after "Return to Home" or at a defined LAND waypoint for missions. See: Fixed Wing Landing.md
IMPORTANT: When updating from an older INAV version with a diff, please change the following settings before using Autoland for better performance.
Plane with no tail: set nav_wp_radius = 1000
Plane with tail: set nav_wp_radius = 800
Compass and Barometer changes
INAV now relies more heavily on GNSS data for navigation than before. This can provide more security if the Barometer fails, or if the multirotor is suffering from Compass interference. By still allowing it to navigate back to home.
From the release of INAV 7.1. The use of a compass is no longer mandatory for multirotor navigation as it once was. BUT it is still recommended for the best navigation performance, when it comes to maintaining a fixed position for an extended period of time, without heading drift. e.g. in Poshold. Or taking off and immediately starting a Waypoint mission.
If a user does decide to omit the use of a compass for a multirotor, be mindful that any navigation mode (RTH, Failsafe, Poshold, Cruise or a Waypoint mission) will not be operational UNTIL a GPS heading is first obtained, by flying in a straight line until both -
- The OSD Heading and Course over Ground indicators display a valid heading. Then keeping both headings closely aligned for a time.
- And the OSD Home arrow appears, showing a valid home direction.
Example Video
For more details see here
Tailsitter Support for VTOL
Tailsitter builds are now natively supported to allow proper Board Orientation switching during transition. Details
Other changes
Updated ICM426xx filtering
The filtering of the ICM426xx gyros has been updated based on changes made to both Ardupilot and BetaFlight and we expect better performance, when comparing to previous INAV versions.
OSD Changes
Users can now customize their own OSD messages, by way of the Programming Framework. Details
The Artificial Horizon will not properly track the real horizon in the correct way, when the craft is inverted. Details
New Fixedwing flight mode
The mode is called Angle Hold. For more details see here
New targets
- FLYCOLORF7V2
CLI
Changed settings
| Name | Description |
|---|---|
gps_dyn_model |
Default: AIR_2G GPS navigation model: Pedestrian, Automotive, Air<1g, Air<2g, Air<4g. Default is AIR_2G. Use pedestrian/Automotive with caution, can cause flyaways with fast flying. |
New Items
| Name | Description |
|---|---|
ahrs_gps_yaw_weight |
Arhs gps yaw weight when mag is avaliable, 0 means no gps yaw, 100 means equal weight as compass Values: 0 - 500 Default: 100 |
nav_fw_land_approach_length |
Length of the final approach Values: 100 - 100000 Default: 35000 |
nav_fw_land_final_approach_pitch2throttle_mod |
Modifier for pitch to throttle ratio at final approach. In Percent. Values: 100 - 400 Default: 100 |
nav_fw_land_flare_alt |
Initial altitude of the flare phase Values: 0 - 10000 Default: 150 |
nav_fw_land_flare_pitch |
Pitch value for flare phase. In degrees Values: -15 - 45 Default: 8 |
nav_fw_land_glide_alt |
Initial altitude of the glide phase Values: 100 - 5000 Default: 200 |
nav_fw_land_glide_pitch |
Pitch value for glide phase. In degrees. Values: -15 - 45 Default: 0 |
nav_fw_land_max_tailwind |
Max. tailwind (in cm/s) if no landing direction with downwind is available Values: 0 - 3000 Default: 140 |
nav_fw_launch_land_abort_deadband |
Launch and landing abort stick deadband in [r/c points], applied after r/c deadband and expo. The Roll/Pitch stick needs to be deflected beyond this deadband to abort the launch or landing. Values: 2 - 250 Default: 100. Replaces nav_fw_launch_abort_deadband |
nav_min_ground_speed |
Minimum ground speed for navigation flight modes [m/s]. Default 7 m/s. Values: 6 - 50 Default: 7 |
nav_rth_fs_landing_delay |
If landing is active on Failsafe and this is above 0. The aircraft will hover or loiter for X seconds before performing the landing. If the battery enters the warning or critical levels, the land will proceed. Default = 0 [seconds] Values: 0 - 1800 Default: 0 |
tailsitter_orientation_offset |
Apply a 90 deg pitch offset in sensor aliment for tailsitter flying mode Default: FALSE |
Removed Items
| Name | Description |
|---|---|
inav_w_xyz_acc_p |
|
nav_fw_launch_abort_deadband |
Replaced by nav_fw_launch_land_abort_deadband |
TL;DR
The list of most important changes is also available in a video form: https://youtu.be/8Q8t_KwlSAQ
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 7.0
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/9427
- Fixed wing attitude stabilisation mode by @breadoven in https://github.com/iNavFlight/inav/pull/9294
- F411 PSA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9459
- updates docs, removed vtx_freq artefacts by @RomanLut in https://github.com/iNavFlight/inav/pull/9506
- GEPRCF405 add IIC2 and change the barometer to IIC2 by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9510
- Enable dshot for unofficial BETAFPVF435 by @mmosca in https://github.com/iNavFlight/inav/pull/9532
- Add VTX power info for MAMBAH743_2022B target by @mmosca in https://github.com/iNavFlight/inav/pull/9539
- Release 7.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9432
- Additional Description for Control Derivative by @MrD-RC in https://github.com/iNavFlight/inav/pull/9521
- Make min ground speed setable a parameter by @MrD-RC in https://github.com/iNavFlight/inav/pull/9428
- update f4 vcp in line with BF by @stronnag in https://github.com/iNavFlight/inav/pull/9544
- Add a parameter to delay landing in the event of a Failsafe by @MrD-RC in https://github.com/iNavFlight/inav/pull/9502
- Add ICM42688P to KAKUTEH7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9546
- Yaw/Altitude estimation sensor fusion by @shota3527 in https://github.com/iNavFlight/inav/pull/9387
- Navpid back calculation anti-windup can only shrink integrator by @shota3527 in https://github.com/iNavFlight/inav/pull/9224
- Add active waypoint number to blackbox by @breadoven in https://github.com/iNavFlight/inav/pull/9507
- SITL: OSD CMS menu does not work by @RomanLut in https://github.com/iNavFlight/inav/pull/9344
- add some icons for O3 with integra for ESP32 Radar instead of ? by @druckgott in https://github.com/iNavFlight/inav/pull/9499
- WP mission mode RTH and Manual mode lockout improvements 7.1.0 by @breadoven in https://github.com/iNavFlight/inav/pull/9558
- tail sitter vtol support by @shota3527 in https://github.com/iNavFlight/inav/pull/9347
- USB MSC: Fix SCIS mode sense write protection bit by @mluessi in https://github.com/iNavFlight/inav/pull/9572
- [Multirotor] Fix Sqrt Controller Position Z limits by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/9575
- Fix #9562 bmi166 acc readout by @mmosca in https://github.com/iNavFlight/inav/pull/9563
- Add support crsf baro altitude combined vario sensor by @r1000ru in https://github.com/iNavFlight/inav/pull/9438
- rebase and re-pr Fix at32 targets by @shanggl in https://github.com/iNavFlight/inav/pull/9618
- Allow S9 on SpeedyBee F405 V3 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9614
- Enable Camera Control modes for MSP DisplayPort by @mmosca in https://github.com/iNavFlight/inav/pull/9626
- Add option to use display_force_sw_blink in msp displayport by @mmosca in https://github.com/iNavFlight/inav/pull/9627
- Fix ahi pitch when inverted by @MrD-RC in https://github.com/iNavFlight/inav/pull/9609
- Fixed wing auto level bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9641
- Resolving HAKRCF722V2 anomalies by @hakrc1 in https://github.com/iNavFlight/inav/pull/9650
- Adjust SW blink interval by @mmosca in https://github.com/iNavFlight/inav/pull/9644
- FLYCOLORF7V2 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9631
- Change LPF filter setting for accgyro_icm42605.c and enable/configure hardware AA filter by @mmosca in https://github.com/iNavFlight/inav/pull/9675
- Delay save settings to prevent ESC lockup on emergency rearm by @MrD-RC in https://github.com/iNavFlight/inav/pull/9681
- Add PINIO to SPEEDYBEEF405WING by @DzikuVx in https://github.com/iNavFlight/inav/pull/9686
- Multirotor emergency landing altitude control response detuning by @breadoven in https://github.com/iNavFlight/inav/pull/9687
- Fix odometer by @MrD-RC in https://github.com/iNavFlight/inav/pull/9716
- Revert "Delay save settings to prevent ESC lockup on emergency rearm" by @MrD-RC in https://github.com/iNavFlight/inav/pull/9715
- Update Odo float type by @MrD-RC in https://github.com/iNavFlight/inav/pull/9718
- Show STOP instead of IDLE if motor stop enabled by @MrD-RC in https://github.com/iNavFlight/inav/pull/9719
- Fixed Wing Autoland by @Scavanger in https://github.com/iNavFlight/inav/pull/9713
- Increase the maximum number of addressable LEDs 7.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9717
- Osd custom by @error414 in https://github.com/iNavFlight/inav/pull/9508
- gps_ublox.c: For M10 to use Glonass & Beideo concurrentlky, use B1C by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9646
- WP mode multirotor landing descent rate fix by @breadoven in https://github.com/iNavFlight/inav/pull/9728
- Backport spektrum telemetry fix from master by @mmosca in https://github.com/iNavFlight/inav/pull/9744
- IFLIGHT Blitz H7 Pro by @DzikuVx in https://github.com/iNavFlight/inav/pull/9748
- [SITL] Fix RealFlight by @Scavanger in https://github.com/iNavFlight/inav/pull/9724
- T-motor Velox F7 V2 target. by @DzikuVx in https://github.com/iNavFlight/inav/pull/9736
- Revert GPS/Baro weight parameters to 7.0 values by @MrD-RC in https://github.com/iNavFlight/inav/pull/9734
- fixed "Set LED Pin PWM" functionality in programming framework by @RomanLut in https://github.com/iNavFlight/inav/pull/9751
- WP mode activation control fix by @breadoven in https://github.com/iNavFlight/inav/pull/9768
- Add temp units to Betaflight compatibility mapping by @mmosca in https://github.com/iNavFlight/inav/pull/9774
- IFLIGHT BLITZ F722 X1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9766
- Show a timeout for in flight rearming by @MrD-RC in https://github.com/iNavFlight/inav/pull/9769
- fix cygwin/sitl build with cmake 3.28.3 (#9787) by @stronnag in https://github.com/iNavFlight/inav/pull/9788
- Add ICM42688P gyro to IFLIGHT_BLITZ_ATF4355 by @mmosca in https://github.com/iNavFlight/inav/pull/9797
- [7.1-RC1] Autoland-Fix by @Scavanger in https://github.com/iNavFlight/inav/pull/9794
- Add ICM42688P to TMOTORF7V2 by @mmosca in https://github.com/iNavFlight/inav/pull/9819
- Servo.md: correct tab name by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9799
- Revert "Show a timeout for in flight rearming" by @MrD-RC in https://github.com/iNavFlight/inav/pull/9846
- Add target to switch to second gyro on MAMBAH743_2022B, instead of first gyro by @mmosca in https://github.com/iNavFlight/inav/pull/9848
- Add missing outputs for SKYSTARSHD2 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9851
- Revert baro alt vario over CRSF by @DzikuVx in https://github.com/iNavFlight/inav/pull/9858
- FOXEERF722DUAL enable 5V power by default by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9860
New Contributors
- @r1000ru made their first contribution in https://github.com/iNavFlight/inav/pull/9438
- @hakrc1 made their first contribution in https://github.com/iNavFlight/inav/pull/9650
Full Changelog: https://github.com/iNavFlight/inav/compare/7.0.0...7.1.0
7.1.0-RC1
2 months ago
Hello and welcome to INAV 7.1 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 7.0
- Backup configuration with CLI
diff allcommand - Download and install the new INAV Configurator 7.1
- Flash INAV 7.1 WITH Full Chip Erase option enabled
- Select Keep current settings from the defaults pop-up
- Go to CLI and restore your 7.0 diff
- Done
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Fixed wing Autoland with landing pattern
INAV supports advanced automatic landings for fixed wing aircraft from version 7.1. The procedure is based on landings for man-carrying aircraft, so that safe landings at a specific location are possible. Supported are landings at Safehome after "Return to Home" or at a defined LAND waypoint for missions. See: Fixed Wing Landing.md
Altitude and Heading estimation changes
INAV now relies more heavily on GNSS data for navigation than before. This can provide more security if the Barometer fails, or if the multirotor is suffering from Compass interference. By still allowing it to navigate back to home. For more details see here
Other changes
Updated ICM426xx filtering
The filtering of the ICM426xx gyros has been updated based on changes made to both Ardupilot and BetaFlight and we expect better performance, when comparing to previous INAV versions.
Custom OSD
Users can now customize their own OSD messages, by way of the Programming Framework. Details
New Fixedwing flight mode
The mode is called Angle Hold. For more details see here
New targets
- FLYCOLORF7V2
CLI
Changed settings
| Name | Description |
|---|---|
gps_dyn_model |
Default: AIR_2G GPS navigation model: Pedestrian, Automotive, Air<1g, Air<2g, Air<4g. Default is AIR_2G. Use pedestrian/Automotive with caution, can cause flyaways with fast flying. |
New Items
| Name | Description |
|---|---|
ahrs_gps_yaw_weight |
Arhs gps yaw weight when mag is avaliable, 0 means no gps yaw, 100 means equal weight as compass Values: 0 - 500 Default: 100 |
nav_fw_land_approach_length |
Length of the final approach Values: 100 - 100000 Default: 35000 |
nav_fw_land_final_approach_pitch2throttle_mod |
Modifier for pitch to throttle ratio at final approach. In Percent. Values: 100 - 400 Default: 100 |
nav_fw_land_flare_alt |
Initial altitude of the flare phase Values: 0 - 10000 Default: 150 |
nav_fw_land_flare_pitch |
Pitch value for flare phase. In degrees Values: -15 - 45 Default: 8 |
nav_fw_land_glide_alt |
Initial altitude of the glide phase Values: 100 - 5000 Default: 200 |
nav_fw_land_glide_pitch |
Pitch value for glide phase. In degrees. Values: -15 - 45 Default: 0 |
nav_fw_land_max_tailwind |
Max. tailwind (in cm/s) if no landing direction with downwind is available Values: 0 - 3000 Default: 140 |
nav_fw_launch_land_abort_deadband |
Launch and landing abort stick deadband in [r/c points], applied after r/c deadband and expo. The Roll/Pitch stick needs to be deflected beyond this deadband to abort the launch or landing. Values: 2 - 250 Default: 100 |
nav_min_ground_speed |
Minimum ground speed for navigation flight modes [m/s]. Default 7 m/s. Values: 6 - 50 Default: 7 |
nav_rth_fs_landing_delay |
If landing is active on Failsafe and this is above 0. The aircraft will hover or loiter for X seconds before performing the landing. If the battery enters the warning or critical levels, the land will proceed. Default = 0 [seconds] Values: 0 - 1800 Default: 0 |
tailsitter_orientation_offset |
Apply a 90 deg pitch offset in sensor aliment for tailsitter flying mode Default: FALSE |
Removed Items
| Name | Description |
|---|---|
inav_w_xyz_acc_p |
|
nav_fw_launch_abort_deadband |
TL;DR
The list of most important changes is also available in a video form: https://youtu.be/8Q8t_KwlSAQ
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 7.0
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/9427
- Fixed wing attitude stabilisation mode by @breadoven in https://github.com/iNavFlight/inav/pull/9294
- F411 PSA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9459
- updates docs, removed vtx_freq artefacts by @RomanLut in https://github.com/iNavFlight/inav/pull/9506
- GEPRCF405 add IIC2 and change the barometer to IIC2 by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9510
- Enable dshot for unofficial BETAFPVF435 by @mmosca in https://github.com/iNavFlight/inav/pull/9532
- Add VTX power info for MAMBAH743_2022B target by @mmosca in https://github.com/iNavFlight/inav/pull/9539
- Release 7.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9432
- Additional Description for Control Derivative by @MrD-RC in https://github.com/iNavFlight/inav/pull/9521
- Make min ground speed setable a parameter by @MrD-RC in https://github.com/iNavFlight/inav/pull/9428
- update f4 vcp in line with BF by @stronnag in https://github.com/iNavFlight/inav/pull/9544
- Add a parameter to delay landing in the event of a Failsafe by @MrD-RC in https://github.com/iNavFlight/inav/pull/9502
- Add ICM42688P to KAKUTEH7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9546
- Yaw/Altitude estimation sensor fusion by @shota3527 in https://github.com/iNavFlight/inav/pull/9387
- Navpid back calculation anti-windup can only shrink integrator by @shota3527 in https://github.com/iNavFlight/inav/pull/9224
- Add active waypoint number to blackbox by @breadoven in https://github.com/iNavFlight/inav/pull/9507
- SITL: OSD CMS menu does not work by @RomanLut in https://github.com/iNavFlight/inav/pull/9344
- add some icons for O3 with integra for ESP32 Radar instead of ? by @druckgott in https://github.com/iNavFlight/inav/pull/9499
- WP mission mode RTH and Manual mode lockout improvements 7.1.0 by @breadoven in https://github.com/iNavFlight/inav/pull/9558
- tail sitter vtol support by @shota3527 in https://github.com/iNavFlight/inav/pull/9347
- USB MSC: Fix SCIS mode sense write protection bit by @mluessi in https://github.com/iNavFlight/inav/pull/9572
- [Multirotor] Fix Sqrt Controller Position Z limits by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/9575
- Fix #9562 bmi166 acc readout by @mmosca in https://github.com/iNavFlight/inav/pull/9563
- Add support crsf baro altitude combined vario sensor by @r1000ru in https://github.com/iNavFlight/inav/pull/9438
- rebase and re-pr Fix at32 targets by @shanggl in https://github.com/iNavFlight/inav/pull/9618
- Allow S9 on SpeedyBee F405 V3 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9614
- Enable Camera Control modes for MSP DisplayPort by @mmosca in https://github.com/iNavFlight/inav/pull/9626
- Add option to use display_force_sw_blink in msp displayport by @mmosca in https://github.com/iNavFlight/inav/pull/9627
- Fix ahi pitch when inverted by @MrD-RC in https://github.com/iNavFlight/inav/pull/9609
- Fixed wing auto level bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9641
- Resolving HAKRCF722V2 anomalies by @hakrc1 in https://github.com/iNavFlight/inav/pull/9650
- Adjust SW blink interval by @mmosca in https://github.com/iNavFlight/inav/pull/9644
- FLYCOLORF7V2 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9631
- Change LPF filter setting for accgyro_icm42605.c and enable/configure hardware AA filter by @mmosca in https://github.com/iNavFlight/inav/pull/9675
- Delay save settings to prevent ESC lockup on emergency rearm by @MrD-RC in https://github.com/iNavFlight/inav/pull/9681
- Add PINIO to SPEEDYBEEF405WING by @DzikuVx in https://github.com/iNavFlight/inav/pull/9686
- Multirotor emergency landing altitude control response detuning by @breadoven in https://github.com/iNavFlight/inav/pull/9687
- Fix odometer by @MrD-RC in https://github.com/iNavFlight/inav/pull/9716
- Revert "Delay save settings to prevent ESC lockup on emergency rearm" by @MrD-RC in https://github.com/iNavFlight/inav/pull/9715
- Update Odo float type by @MrD-RC in https://github.com/iNavFlight/inav/pull/9718
- Show STOP instead of IDLE if motor stop enabled by @MrD-RC in https://github.com/iNavFlight/inav/pull/9719
- Fixed Wing Autoland by @Scavanger in https://github.com/iNavFlight/inav/pull/9713
- Increase the maximum number of addressable LEDs 7.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9717
- Osd custom by @error414 in https://github.com/iNavFlight/inav/pull/9508
New Contributors
- @r1000ru made their first contribution in https://github.com/iNavFlight/inav/pull/9438
- @hakrc1 made their first contribution in https://github.com/iNavFlight/inav/pull/9650
Full Changelog: https://github.com/iNavFlight/inav/compare/7.0.0...7.1.0-RC1
7.0.0
5 months ago
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
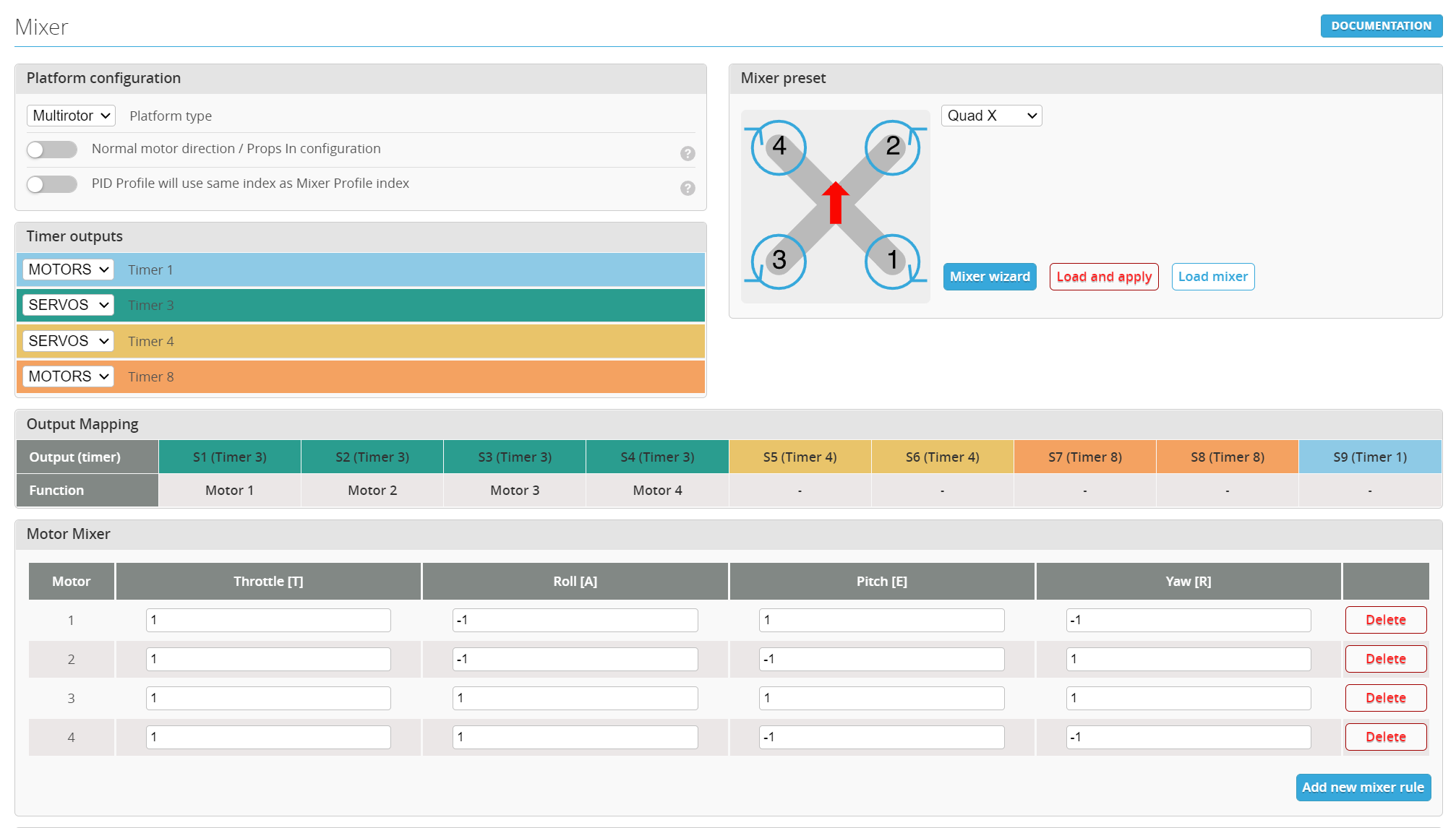
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
In-flight Emergency Rearm
With INAV 7.0 came the ability to Emergency Rearm. This allows you to rearm in flight when you accidentally disarm. You need to do this within 5 seconds of disarming. Which sounds short, but is actually a pretty long time. Emergency Rearm can be used after a launch and while the aircraft still believes it's flying. It bypasses safety checks (including the throttle position) and doesn't trigger auto launch. Multirotors will also briefly switch to Angle to stabilise and level the flight. You can read all about it at https://github.com/iNavFlight/inav/pull/9254
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
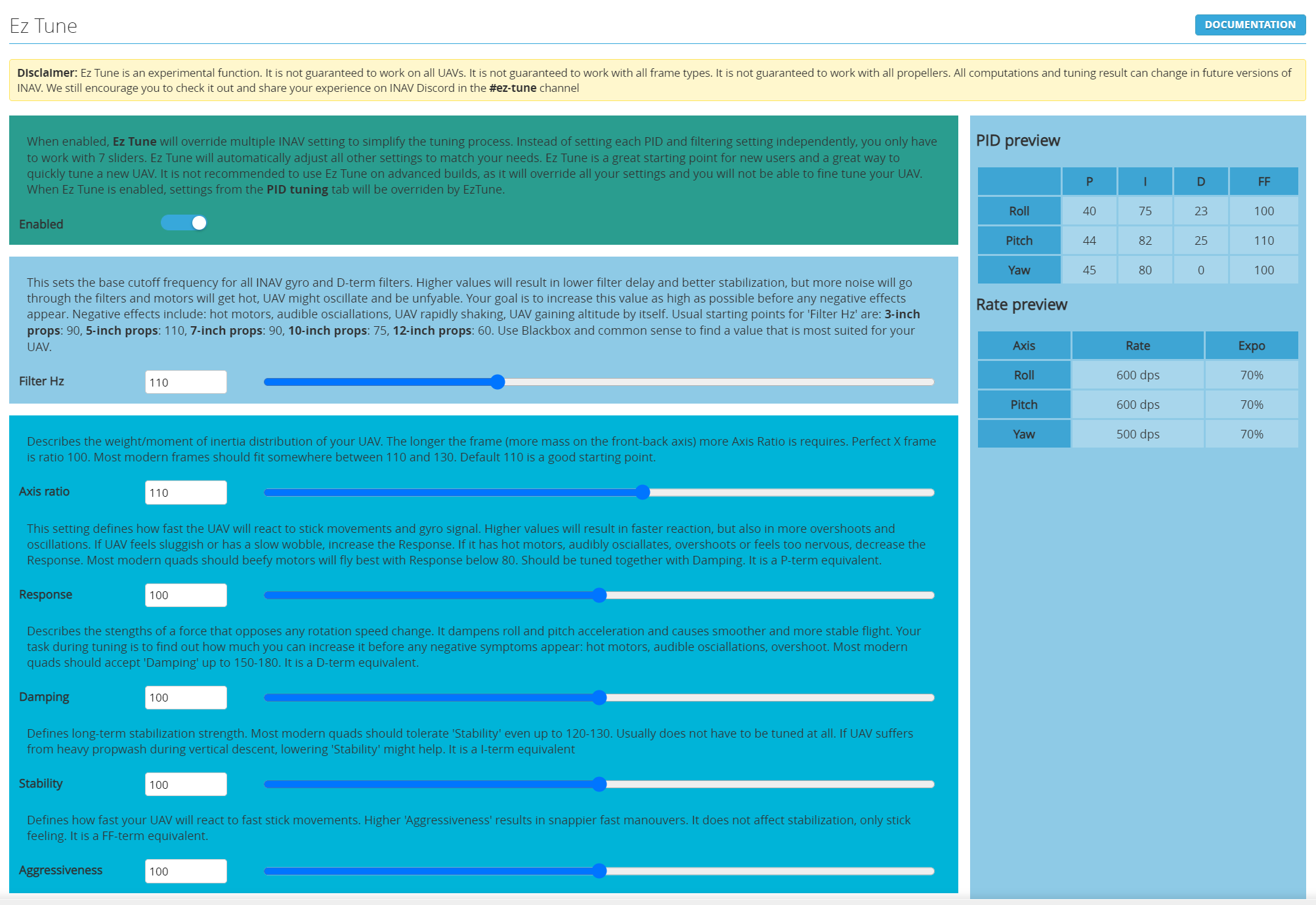
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
-
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
- DAKEFPV F405
- DAKEFPV F722
- AtomRC F405 NAVI Delux
- JHEMCUF722
- JHEMCUF405
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
| gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some receivers may limit the maximum number of satellites tracked when set to a higher rate or even stop sending navigation updates if the value is too high. Some M10 devices can do up to 25Hz. 10 is a safe value for M8 and newer. Values: 5 - 200 Default: 10 |
| gps_ublox_use_beidou | Enable use of Beidou satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps hardware support [OFF/ON]. Default: FALSE |
| gps_ublox_use_glonass | Enable use of Glonass satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps haardware support [OFF/ON]. Default: FALSE |
| led_pin_pwm_mode | PWM mode of LED pin. Values: SHARED_LOW, SHARED_HIGH, LOW, HIGH. Default: SHARED_LOW |
| mixer_automated_switch | If set to on, This mixer_profile will try to switch to another mixer_profile when 1.RTH heading home is requested and distance to home is lager than 3*nav_fw_loiter_radius on mixer_profile is a MULTIROTOR or TRICOPTER platform_type. 2. RTH landing is requested on this mixer_profile is a AIRPLANE platform_type Default: FALSE |
| mixer_pid_profile_linking | If enabled, pid profile_index will follow mixer_profile index. Set to OFF(default) if you want to handle PID profile by your self. Recommend to set to ON on all mixer_profiles to let the mixer_profile handle the PID profile switching on a VTOL or mixed platform type setup. Default: FALSE |
| mixer_switch_trans_timer | If switch another mixer_profile is scheduled by mixer_automated_switch or mixer_automated_switch. Activate Mixertransion motor/servo mixing for this many decisecond(0.1s) before the actual mixer_profile switch. Values: 0 - 200 Default: 0 |
| motorstop_on_low | If enabled, motor will stop when throttle is low on this mixer_profile Default: FALSE |
| nav_cruise_yaw_rate | Max YAW rate when NAV COURSE HOLD/CRUISE mode is enabled. Set to 0 to disable on fixed wing (Note: On multirotor setting to 0 will disable Course Hold/Cruise mode completely) [dps] Values: 0 - 120 Default: 20 |
| nav_landing_bump_detection | Allows immediate landing detection based on G bump at touchdown when set to ON. Requires a barometer and currently only works for multirotors. Default: FALSE |
| nav_mc_althold_throttle | If set to STICK the FC remembers the throttle stick position when enabling ALTHOLD and treats it as the neutral midpoint for holding altitude. If set to MID_STICK or HOVER the neutral midpoint is set to the mid stick position or the hover throttle position respectively. Default: STICK |
| nav_rth_linear_descent_start_distance | The distance [m] away from home to start the linear descent. 0 = immediately (original linear descent behaviour) Values: 0 - 10000 Default: 0 |
| nav_rth_use_linear_descent | If enabled, the aircraft will gradually descent to the nav_rth_home_altitude en route. The distance from home to start the descent can be set with nav_rth_linear_descent_start_distance. Default: FALSE |
| osd_arm_screen_display_time | Amount of time to display the arm screen [ms] Values: 1000 - 5000 Default: 1500 |
| osd_inav_to_pilot_logo_spacing | The space between the INAV and pilot logos, if osd_use_pilot_logo is ON. This number may be adjusted so that it fits the odd/even col width displays. For example, if using an odd column width display, such as Walksnail, and this is set to 4. 1 will be added so that the logos are equally spaced from the centre of the screen. Values: 0 - 20 Default: 8 |
| osd_joystick_down | PWM value for DOWN key Values: 0 - 100 Default: 0 |
| osd_joystick_enabled | Enable OSD Joystick emulation Default: FALSE |
| osd_joystick_enter | PWM value for ENTER key Values: 0 - 100 Default: 75 |
| osd_joystick_left | PWM value for LEFT key Values: 0 - 100 Default: 63 |
| osd_joystick_right | PWM value for RIGHT key Values: 0 - 100 Default: 28 |
| osd_joystick_up | PWM value for UP key Values: 0 - 100 Default: 48 |
| osd_mah_precision | Number of digits used for mAh precision. Currently used by mAh Used and Battery Remaining Capacity Values: 4 - 6 Default: 4 |
| osd_use_pilot_logo | Use custom pilot logo with/instead of the INAV logo. The pilot logo must be characters 473 to 511 Default: FALSE |
| pid_iterm_limit_percent | Limits max/min I-term value in stabilization PID controller. It solves the problem of servo saturation before take-off/throwing the airplane into the air. Or multirotors with low authority. By default, error accumulated in I-term can not exceed 33% of total pid throw (around 165us on deafult pidsum_limit of pitch/roll). Set 0 to disable completely. Values: 0 - 200 Default: 33 |
| tpa_on_yaw | Throttle PID attenuation also reduces influence on YAW for multi-rotor, Should be set to ON for tilting rotors. Default: FALSE |
Removed Items
| Name | Description |
|---|---|
| dterm_lpf2_hz | |
| dterm_lpf2_type | |
| frsky_coordinates_format | |
| frsky_default_latitude | |
| frsky_default_longitude | |
| frsky_unit | |
| frsky_vfas_precision | |
| fw_iterm_throw_limit | |
| moron_threshold | |
| nav_fw_cruise_yaw_rate | |
| nav_use_midthr_for_althold | |
| osd_mah_used_precision | |
| output_mode |
TL;DR
The list of most important changes is also available in a video form: https://youtu.be/8Q8t_KwlSAQ
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 6.1.1
What's Changed
- INAV 7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8886
- Enable USE_SERVO_SBUS on all targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8876
- Release 6.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8763
- Drop D-term LPF2 as no longer used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8875
- Drop FrDky D-series telemetry support by @DzikuVx in https://github.com/iNavFlight/inav/pull/8878
- Allow scheduler to go down to 10us period by @DzikuVx in https://github.com/iNavFlight/inav/pull/8877
- Drop moron_threshold setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/8859
- Release 6.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8912
- Add target BLACKPILL_F411 by @HKR1987 in https://github.com/iNavFlight/inav/pull/8902
- Update GCC to 10.3.1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8917
- Release 6.1.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8887
- docs: fix documentation of gvar set by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8955
- Update Building in MSYS2 Doc by @pwnept in https://github.com/iNavFlight/inav/pull/8934
- Add osd menu option to preview font file by @mmosca in https://github.com/iNavFlight/inav/pull/8932
- Jh update usb flash doc by @stronnag in https://github.com/iNavFlight/inav/pull/8974
- Add the "GEPRCF722_BT_HD" target by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8943
- Recognize MPU9255 as a valid IMU by @VasilKalchev in https://github.com/iNavFlight/inav/pull/8927
- Cleanup m25p16 flash detection code by @mmosca in https://github.com/iNavFlight/inav/pull/8985
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/8987
- Add IFLIGHT_BLITZ_F7_AIO target by @mmosca in https://github.com/iNavFlight/inav/pull/8977
- Mark IFLIGHT_BLITZ_F7_AIO as SKIP_RELEASES by @mmosca in https://github.com/iNavFlight/inav/pull/8988
- Have you ever wished INAV had a mute switch? by @mmosca in https://github.com/iNavFlight/inav/pull/8989
- Enhance Linear Descent RTH feature by @MrD-RC in https://github.com/iNavFlight/inav/pull/8810
- updated battery profile documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9002
- INAV capitalization by @ryet9 in https://github.com/iNavFlight/inav/pull/9001
- Rename AUTO LEVEL by @MrD-RC in https://github.com/iNavFlight/inav/pull/8972
- fixed pitot sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9019
- modify servo and motor and magnetometer for AocodaRC F4V2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9040
- Release 6.1.0 mergeback by @DzikuVx in https://github.com/iNavFlight/inav/pull/8957
- Fix: SpeedyBee F405 V3 uSD card vs OSD interference by @shirase in https://github.com/iNavFlight/inav/pull/9028
- Update Navigation.md by @RomanLut in https://github.com/iNavFlight/inav/pull/9058
- Update Aocodarcf7mini by @dlt2018 in https://github.com/iNavFlight/inav/pull/9056
- Add MPU6000 and MPU6500 support to Foxeer F7 V4 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9070
- Cleanup abandoned EXTI code by @DzikuVx in https://github.com/iNavFlight/inav/pull/9071
- Multirotor WP speed fix when altitude enforce enabled by @breadoven in https://github.com/iNavFlight/inav/pull/9067
- Update target.h by @pgp69 in https://github.com/iNavFlight/inav/pull/9037
- updated controls documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9024
- remove obsolete static_assert by @stronnag in https://github.com/iNavFlight/inav/pull/9077
- [SITL OSX] Fix some of the warnings and add macosx SITL build to workflows by @mmosca in https://github.com/iNavFlight/inav/pull/9063
- Add QUADSPI Support for H7 and M25P16 Flash Driver by @mluessi in https://github.com/iNavFlight/inav/pull/8915
- Fix bug for DJI O3's altitude when using imperial by @MrD-RC in https://github.com/iNavFlight/inav/pull/9076
- Switch sensor infrastructure to be float internally by @DzikuVx in https://github.com/iNavFlight/inav/pull/9075
- [SITL] disable nagle for UART TCP by @stronnag in https://github.com/iNavFlight/inav/pull/9079
- [SITL OSX] Fix lldb debugging in OSX and improve OSX detection by @mmosca in https://github.com/iNavFlight/inav/pull/9082
- [SITL] consolidate IP helpers into target.c by @stronnag in https://github.com/iNavFlight/inav/pull/9080
- [SITL] add missing BSD header from IP consolidation by @stronnag in https://github.com/iNavFlight/inav/pull/9085
- [Docs] Readme updates by @stronnag in https://github.com/iNavFlight/inav/pull/9090
- Speedybee F405 WING fixes by @DzikuVx in https://github.com/iNavFlight/inav/pull/9094
- fix conflicting types by @stronnag in https://github.com/iNavFlight/inav/pull/9097
- allow HITL to run with HW baro failure by @RomanLut in https://github.com/iNavFlight/inav/pull/9021
- Set 10Hz update rate for M9 and M10 gps devices by default and allow higher refresh rates by @mmosca in https://github.com/iNavFlight/inav/pull/9103
- Add board Aocodarcf405aio by @dlt2018 in https://github.com/iNavFlight/inav/pull/9089
- Update Borad Aocodarch7dual by @dlt2018 in https://github.com/iNavFlight/inav/pull/9100
- DSP based gyro operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/9078
- Acc processing with DSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9116
- Remove brew update step for SITL mac build by @mmosca in https://github.com/iNavFlight/inav/pull/9127
- ICM42605 gyro parsing fix by @erstec in https://github.com/iNavFlight/inav/pull/9125
- Release 6.1.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9106
- Fix version check and apply GNSS configuration for M8+ gps by @mmosca in https://github.com/iNavFlight/inav/pull/9128
- Multirotor landing bump detection by @breadoven in https://github.com/iNavFlight/inav/pull/8744
- Add configuration of Beidou and Glonass to M8, M9 and M10 gps modules by @mmosca in https://github.com/iNavFlight/inav/pull/9124
- update gpsConfig_t PG version by @stronnag in https://github.com/iNavFlight/inav/pull/9131
- It looks like UBLOX ROM version 2.01 omits the = sign from PROTVER by @mmosca in https://github.com/iNavFlight/inav/pull/9132
- reenable LTO for MacOS firmware builds by @stronnag in https://github.com/iNavFlight/inav/pull/9136
- Flycolor F7 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9122
- updated buzzer documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9148
- fixed beeper -ON_USB for 1S setup, fixed beeper -SYSTEM_INIT by @RomanLut in https://github.com/iNavFlight/inav/pull/9147
- Enable possibility to simulate HW sensor failures in HITL by @RomanLut in https://github.com/iNavFlight/inav/pull/8858
- Kakute H7 Wing by @erstec in https://github.com/iNavFlight/inav/pull/9145
- Update target.h by @dlt2018 in https://github.com/iNavFlight/inav/pull/9151
- fix target's by @dlt2018 in https://github.com/iNavFlight/inav/pull/9149
- Improve OSD stats page avg efficiency value scaling by @rmaia3d in https://github.com/iNavFlight/inav/pull/9109
- Fix AOCODARCH7DUAL Buzzer continous beeping issue by @lida2003 in https://github.com/iNavFlight/inav/pull/9143
- [SITL] suppress spurious linker warning with gcc12+ by @stronnag in https://github.com/iNavFlight/inav/pull/9163
- How to test a pull request.md - two minor typos by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9170
- Add some documentation on how to test a PR by @mmosca in https://github.com/iNavFlight/inav/pull/9168
- fixed enter/exit camera osd stick positions docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9165
- Fix: Inav 7.0.0 last build not working on SPEEDYBEEF405V3 by @shirase in https://github.com/iNavFlight/inav/pull/9162
- Foxeer H743 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9171
- Add new OSD document by @MrD-RC in https://github.com/iNavFlight/inav/pull/9177
- Kakute H7 Wing Defaults altered by @erstec in https://github.com/iNavFlight/inav/pull/9185
- Add more baud rates to auto baud, as listed in m10 integration manual by @mmosca in https://github.com/iNavFlight/inav/pull/9174
- Use all 8 motor outputs on AXISFLYINGF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/9179
- MSP VTX support by @mmosca in https://github.com/iNavFlight/inav/pull/9166
- Repair led strip by @dlt2018 in https://github.com/iNavFlight/inav/pull/9190
- Get rid of some not needed floating point divisions by @DzikuVx in https://github.com/iNavFlight/inav/pull/9207
- Restore autobaud for m8 gps by @mmosca in https://github.com/iNavFlight/inav/pull/9219
- Update SPEEDYBEEF7V3. Fix Sensor VL53L1X by @druckgott in https://github.com/iNavFlight/inav/pull/9221
- Extend from 4 ADC channels to 6 (Matek H743 and others) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9180
- Nav altitude control improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8920
- fix neutronrcf435mini aio motor2 output bug by @shanggl in https://github.com/iNavFlight/inav/pull/9226
- Try to set vscode to play nice with formating style by @mmosca in https://github.com/iNavFlight/inav/pull/9223
- Fix for #9225, some OSD elements are skipped incorrectly, when GPS is not present. by @mmosca in https://github.com/iNavFlight/inav/pull/9229
- Block by Runtime calibration of ACC only when ACC is required by @DzikuVx in https://github.com/iNavFlight/inav/pull/9227
- Fix ADC on FOXEERH743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9230
- Update speedybeef405v3 docs, with some common issues by @mmosca in https://github.com/iNavFlight/inav/pull/9231
- Let M10 GPS disable SBAS and some small fixes changes by @mmosca in https://github.com/iNavFlight/inav/pull/9232
- Multicopter emergency landing improvement/fix by @breadoven in https://github.com/iNavFlight/inav/pull/9169
- Fix SITL memory leaks by @psmitty7373 in https://github.com/iNavFlight/inav/pull/9235
- Add constrain for DynLPF computation by @DzikuVx in https://github.com/iNavFlight/inav/pull/9242
- Multirotor Althold throttle hover option + altitude adjustment indication by @breadoven in https://github.com/iNavFlight/inav/pull/9220
- OSD Altitude field fix by @breadoven in https://github.com/iNavFlight/inav/pull/9261
- Add blackbox target heading + missing Nav auto enabled flight modes by @breadoven in https://github.com/iNavFlight/inav/pull/9249
- SKYSTARSH743HD remove non-existent S9 & S10. Add servos target by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9214
- [doc] update serial_printf document iaw current implementation by @stronnag in https://github.com/iNavFlight/inav/pull/9266
- Change motor/servo assignements for RUSH_BLADE_F7 targets by @mmosca in https://github.com/iNavFlight/inav/pull/9262
- Pitot DLVR-L10D sensor by @jmajew in https://github.com/iNavFlight/inav/pull/9216
- Add GEPRCF405 and GEPRCF722 targets by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9260
- Multi function OSD utility by @breadoven in https://github.com/iNavFlight/inav/pull/8698
- Timer DMA burst by @shirase in https://github.com/iNavFlight/inav/pull/9265
- Add mup6500 for mambaf405us by @jianwwpro in https://github.com/iNavFlight/inav/pull/8827
- Programming Frameword.md: Update to match Configurator renaming by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9275
- SpeedyBee F7 Mini V2 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9272
- Speedybee F405 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9273
- Multirotor course hold/cruise mode by @breadoven in https://github.com/iNavFlight/inav/pull/9213
- Bump navConfig PG that was forgotten in #9220 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9278
- Switch MatekF405TE to use burst DMA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9277
- Update Building in Windows 10 or 11 with Linux Subsystem.md by @wchnflr in https://github.com/iNavFlight/inav/pull/9279
- BETAFPVF435 unofficial target by @mmosca in https://github.com/iNavFlight/inav/pull/9281
- Make PWM allocation a bit smarter. by @mmosca in https://github.com/iNavFlight/inav/pull/9268
- [sitl] add --version, add git commit to version output by @stronnag in https://github.com/iNavFlight/inav/pull/9286
- docs/programming user21 typo by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9289
- Failsafe fixes by @breadoven in https://github.com/iNavFlight/inav/pull/9283
- Mixer throttle fixes/improvements + more OSD Throttle changes by @breadoven in https://github.com/iNavFlight/inav/pull/9274
- Ignore tasks.json and use tabs in C files by @MrD-RC in https://github.com/iNavFlight/inav/pull/9295
- Enable the virtual pitot by default by @MrD-RC in https://github.com/iNavFlight/inav/pull/9299
- Add DPS310 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9284
- Drop output_mode setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/9300
- Throttle related refactor/clean up by @breadoven in https://github.com/iNavFlight/inav/pull/9287
- docs/ipf: Fix typos and clarify wording by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9298
- Further simplify timer usage flags. by @mmosca in https://github.com/iNavFlight/inav/pull/9288
- Bulk update targets with new pwm output assignments by @mmosca in https://github.com/iNavFlight/inav/pull/9309
- Remove timer compatibility define, since all targets have been updated by @mmosca in https://github.com/iNavFlight/inav/pull/9318
- DSHOT delay fix by @shirase in https://github.com/iNavFlight/inav/pull/9321
- [docs] modernise Serial and RX documents by @stronnag in https://github.com/iNavFlight/inav/pull/9322
- Mixer profile to open the posibility for vtol/mixed platform by @shota3527 in https://github.com/iNavFlight/inav/pull/8555
- Add SouthPAN SBAS for all my friends in AU/NZ. by @mmosca in https://github.com/iNavFlight/inav/pull/9320
- Drop NMEA protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/9302
- SpeedyBee F405 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9324
- SpeedyBEEF405WING Change S11 timer, since TIM1 is used by LED by @mmosca in https://github.com/iNavFlight/inav/pull/9325
- Remove info about F3 mcus from Temperature sensors documentation by @mmosca in https://github.com/iNavFlight/inav/pull/9337
- Add Rate Dynamics to MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9336
- Update PR test instructions by @mmosca in https://github.com/iNavFlight/inav/pull/9338
- Flight remaining flight distance value by @MrD-RC in https://github.com/iNavFlight/inav/pull/9333
- Fix mixer config initialization sequence by @shota3527 in https://github.com/iNavFlight/inav/pull/9339
- Fix for Rate dynamics MSP layer by @DzikuVx in https://github.com/iNavFlight/inav/pull/9340
- Add myself to Authors by @mmosca in https://github.com/iNavFlight/inav/pull/9341
- Add odometer to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9335
- Update Controls.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9351
- IPF: Add yaw operand to go with pitch and roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9305
- Add MatekH743HD variant by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9244
- additional fixes for mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9363
- fixed HITL docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9353
- Add the Aocodarcf722aio file by @dlt2018 in https://github.com/iNavFlight/inav/pull/9314
- Lower default hover throttle to 30% by @mmosca in https://github.com/iNavFlight/inav/pull/9361
- Increase channels to 24 for Jeti by @MrD-RC in https://github.com/iNavFlight/inav/pull/9350
- Add pilot logo to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9332
- fixes servo output issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9366
- minor changes on ahrs by @shota3527 in https://github.com/iNavFlight/inav/pull/9360
- Timer N channel fix by @shirase in https://github.com/iNavFlight/inav/pull/9276
- Add ICM42605 driver for SKYSTARSF405HD by @DusKing1 in https://github.com/iNavFlight/inav/pull/9370
- Multirotor coursehold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9380
- Ez Tune for Multirotors by @DzikuVx in https://github.com/iNavFlight/inav/pull/9354
- update docker build scripts by @RomanLut in https://github.com/iNavFlight/inav/pull/9346
- Add SYM_TOTAL and SYM_GFORCE to BFCOMPAT by @mmosca in https://github.com/iNavFlight/inav/pull/9385
- In flight emergency rearm by @breadoven in https://github.com/iNavFlight/inav/pull/9254
- Re-enable baro. max chip seems to cause issues by @mmosca in https://github.com/iNavFlight/inav/pull/9400
- Make it easier to include all baro drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9394
- Make it easier to include all compass drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9401
- BFCOMPAT - improve wind and airspeed fields and labels by @rmaia3d in https://github.com/iNavFlight/inav/pull/9388
- HITL/SITL: allow hitl/sitl to arm with uncalibrated accelerometer by @RomanLut in https://github.com/iNavFlight/inav/pull/9345
- fix mixer_profie configurator issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9364
- flight/pid.c: fix AngleOverride(yaw) to degrees by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9329
- HITL: simulate battery voltage with any sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9212
- HITL: hd osd support by @RomanLut in https://github.com/iNavFlight/inav/pull/9327
- Fixed #9399 can't find baro chip on PB6/PB7 I2C1 by @lida2003 in https://github.com/iNavFlight/inav/pull/9412
- Fix JETI EXBUS overflow by @DzikuVx in https://github.com/iNavFlight/inav/pull/9407
- Disable ASFR function on ICM426xx driver by @DzikuVx in https://github.com/iNavFlight/inav/pull/9409
- 16G scale range for bmi270 accelerometer by @shota3527 in https://github.com/iNavFlight/inav/pull/9410
- tpa on yaw and i-term limit by @shota3527 in https://github.com/iNavFlight/inav/pull/9408
- FW Auto level trim bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9393
- Enhance mAh remaining OSD element by @MrD-RC in https://github.com/iNavFlight/inav/pull/9334
- Allow f722 to use mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9416
- Correct disarm servo throttle by @DzikuVx in https://github.com/iNavFlight/inav/pull/9413
- SAFETY issue -- servos.c: Correct servo throttle off when disarmed (not full throttle at disarm) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9330
- OSD Joystick by @RomanLut in https://github.com/iNavFlight/inav/pull/9201
- New target: ATOMRC Exceed F405 FC V2 by @NickB1 in https://github.com/iNavFlight/inav/pull/8956
- Add more power options for 1G3 group by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9243
- New target: SDMODELH7V1 by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9114
- Framework.md - Note about common error by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9422
- Update OSD.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9425
- comment on how to clone specific INAV releases added by @Daniel-1276 in https://github.com/iNavFlight/inav/pull/9414
- update vtol documents by @shota3527 in https://github.com/iNavFlight/inav/pull/9426
- Put getConfigMixerProfile as the last byte in message by @DzikuVx in https://github.com/iNavFlight/inav/pull/9431
- Multirotor arming safety course hold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9435
- [GPS] fix Neo6M recognition by @stronnag in https://github.com/iNavFlight/inav/pull/9446
- Add DPS310 and SPL06 to FLYWOOF745 target by @mmosca in https://github.com/iNavFlight/inav/pull/9448
- Various PWM output changes. Mainly to get rid of potential conflicts by @DzikuVx in https://github.com/iNavFlight/inav/pull/9452
- Show system message when linear descent begins by @MrD-RC in https://github.com/iNavFlight/inav/pull/9453
- Fixed wing RC altitude adjustment fix by @breadoven in https://github.com/iNavFlight/inav/pull/9462
- Unable fo arm 3d esc rover by @mmosca in https://github.com/iNavFlight/inav/pull/9461
- Change the SPI of Mamba H743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9464
- Flywoof745 of der commented motor numbers by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9479
- Change speedybeeF7V3 default timer allocation by @mmosca in https://github.com/iNavFlight/inav/pull/9475
- Correct output order of FLYWOOF745 target to match BF and production board layout. by @mmosca in https://github.com/iNavFlight/inav/pull/9478
- TMOTORF7V2 has an optional baro, so add more drivers by @mmosca in https://github.com/iNavFlight/inav/pull/9465
- Revert "Enable the virtual pitot by default" by @DzikuVx in https://github.com/iNavFlight/inav/pull/9470
- AtomRC F405 DELUX by @DzikuVx in https://github.com/iNavFlight/inav/pull/9472
- Add FLYWOO new target "FLYWOOF405S_AIO" by @wchnflr in https://github.com/iNavFlight/inav/pull/9251
- FLYWOOF405S_AIO: rename CMakeLists by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9494
- DAKEFPVF722 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9496
- DAKEFPVF405 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9495
- fix hdzero channel settings over displayport by @error414 in https://github.com/iNavFlight/inav/pull/9486
- target: Add JHEMCU F722 target board support by @jhemcu in https://github.com/iNavFlight/inav/pull/9522
New Contributors
- @HKR1987 made their first contribution in https://github.com/iNavFlight/inav/pull/8902
- @VasilKalchev made their first contribution in https://github.com/iNavFlight/inav/pull/8927
- @ryet9 made their first contribution in https://github.com/iNavFlight/inav/pull/9001
- @shirase made their first contribution in https://github.com/iNavFlight/inav/pull/9028
- @pgp69 made their first contribution in https://github.com/iNavFlight/inav/pull/9037
- @lida2003 made their first contribution in https://github.com/iNavFlight/inav/pull/9143
- @druckgott made their first contribution in https://github.com/iNavFlight/inav/pull/9221
- @psmitty7373 made their first contribution in https://github.com/iNavFlight/inav/pull/9235
- @jianwwpro made their first contribution in https://github.com/iNavFlight/inav/pull/8827
- @wchnflr made their first contribution in https://github.com/iNavFlight/inav/pull/9279
- @NickB1 made their first contribution in https://github.com/iNavFlight/inav/pull/8956
- @Daniel-1276 made their first contribution in https://github.com/iNavFlight/inav/pull/9414
- @error414 made their first contribution in https://github.com/iNavFlight/inav/pull/9486
- @jhemcu made their first contribution in https://github.com/iNavFlight/inav/pull/9522
Full Changelog: https://github.com/iNavFlight/inav/compare/6.1.1...7.0.0
7.0.0-RC3
5 months ago
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
-
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
| gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some receivers may limit the maximum number of satellites tracked when set to a higher rate or even stop sending navigation updates if the value is too high. Some M10 devices can do up to 25Hz. 10 is a safe value for M8 and newer. Values: 5 - 200 Default: 10 |
| gps_ublox_use_beidou | Enable use of Beidou satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps hardware support [OFF/ON]. Default: FALSE |
| gps_ublox_use_glonass | Enable use of Glonass satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps haardware support [OFF/ON]. Default: FALSE |
| led_pin_pwm_mode | PWM mode of LED pin. Values: SHARED_LOW, SHARED_HIGH, LOW, HIGH. Default: SHARED_LOW |
| mixer_automated_switch | If set to on, This mixer_profile will try to switch to another mixer_profile when 1.RTH heading home is requested and distance to home is lager than 3*nav_fw_loiter_radius on mixer_profile is a MULTIROTOR or TRICOPTER platform_type. 2. RTH landing is requested on this mixer_profile is a AIRPLANE platform_type Default: FALSE |
| mixer_pid_profile_linking | If enabled, pid profile_index will follow mixer_profile index. Set to OFF(default) if you want to handle PID profile by your self. Recommend to set to ON on all mixer_profiles to let the mixer_profile handle the PID profile switching on a VTOL or mixed platform type setup. Default: FALSE |
| mixer_switch_trans_timer | If switch another mixer_profile is scheduled by mixer_automated_switch or mixer_automated_switch. Activate Mixertransion motor/servo mixing for this many decisecond(0.1s) before the actual mixer_profile switch. Values: 0 - 200 Default: 0 |
| motorstop_on_low | If enabled, motor will stop when throttle is low on this mixer_profile Default: FALSE |
| nav_cruise_yaw_rate | Max YAW rate when NAV COURSE HOLD/CRUISE mode is enabled. Set to 0 to disable on fixed wing (Note: On multirotor setting to 0 will disable Course Hold/Cruise mode completely) [dps] Values: 0 - 120 Default: 20 |
| nav_landing_bump_detection | Allows immediate landing detection based on G bump at touchdown when set to ON. Requires a barometer and currently only works for multirotors. Default: FALSE |
| nav_mc_althold_throttle | If set to STICK the FC remembers the throttle stick position when enabling ALTHOLD and treats it as the neutral midpoint for holding altitude. If set to MID_STICK or HOVER the neutral midpoint is set to the mid stick position or the hover throttle position respectively. Default: STICK |
| nav_rth_linear_descent_start_distance | The distance [m] away from home to start the linear descent. 0 = immediately (original linear descent behaviour) Values: 0 - 10000 Default: 0 |
| nav_rth_use_linear_descent | If enabled, the aircraft will gradually descent to the nav_rth_home_altitude en route. The distance from home to start the descent can be set with nav_rth_linear_descent_start_distance. Default: FALSE |
| osd_arm_screen_display_time | Amount of time to display the arm screen [ms] Values: 1000 - 5000 Default: 1500 |
| osd_inav_to_pilot_logo_spacing | The space between the INAV and pilot logos, if osd_use_pilot_logo is ON. This number may be adjusted so that it fits the odd/even col width displays. For example, if using an odd column width display, such as Walksnail, and this is set to 4. 1 will be added so that the logos are equally spaced from the centre of the screen. Values: 0 - 20 Default: 8 |
| osd_joystick_down | PWM value for DOWN key Values: 0 - 100 Default: 0 |
| osd_joystick_enabled | Enable OSD Joystick emulation Default: FALSE |
| osd_joystick_enter | PWM value for ENTER key Values: 0 - 100 Default: 75 |
| osd_joystick_left | PWM value for LEFT key Values: 0 - 100 Default: 63 |
| osd_joystick_right | PWM value for RIGHT key Values: 0 - 100 Default: 28 |
| osd_joystick_up | PWM value for UP key Values: 0 - 100 Default: 48 |
| osd_mah_precision | Number of digits used for mAh precision. Currently used by mAh Used and Battery Remaining Capacity Values: 4 - 6 Default: 4 |
| osd_use_pilot_logo | Use custom pilot logo with/instead of the INAV logo. The pilot logo must be characters 473 to 511 Default: FALSE |
| pid_iterm_limit_percent | Limits max/min I-term value in stabilization PID controller. It solves the problem of servo saturation before take-off/throwing the airplane into the air. Or multirotors with low authority. By default, error accumulated in I-term can not exceed 33% of total pid throw (around 165us on deafult pidsum_limit of pitch/roll). Set 0 to disable completely. Values: 0 - 200 Default: 33 |
| tpa_on_yaw | Throttle PID attenuation also reduces influence on YAW for multi-rotor, Should be set to ON for tilting rotors. Default: FALSE |
Removed Items
| Name | Description |
|---|---|
| dterm_lpf2_hz | |
| dterm_lpf2_type | |
| frsky_coordinates_format | |
| frsky_default_latitude | |
| frsky_default_longitude | |
| frsky_unit | |
| frsky_vfas_precision | |
| fw_iterm_throw_limit | |
| moron_threshold | |
| nav_fw_cruise_yaw_rate | |
| nav_use_midthr_for_althold | |
| osd_mah_used_precision | |
| output_mode |
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 6.1.1
- INAV 7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8886
- Enable USE_SERVO_SBUS on all targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8876
- Release 6.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8763
- Drop D-term LPF2 as no longer used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8875
- Drop FrDky D-series telemetry support by @DzikuVx in https://github.com/iNavFlight/inav/pull/8878
- Allow scheduler to go down to 10us period by @DzikuVx in https://github.com/iNavFlight/inav/pull/8877
- Drop moron_threshold setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/8859
- Release 6.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8912
- Add target BLACKPILL_F411 by @HKR1987 in https://github.com/iNavFlight/inav/pull/8902
- Update GCC to 10.3.1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8917
- Release 6.1.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8887
- docs: fix documentation of gvar set by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8955
- Update Building in MSYS2 Doc by @pwnept in https://github.com/iNavFlight/inav/pull/8934
- Add osd menu option to preview font file by @mmosca in https://github.com/iNavFlight/inav/pull/8932
- Jh update usb flash doc by @stronnag in https://github.com/iNavFlight/inav/pull/8974
- Add the "GEPRCF722_BT_HD" target by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8943
- Recognize MPU9255 as a valid IMU by @VasilKalchev in https://github.com/iNavFlight/inav/pull/8927
- Cleanup m25p16 flash detection code by @mmosca in https://github.com/iNavFlight/inav/pull/8985
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/8987
- Add IFLIGHT_BLITZ_F7_AIO target by @mmosca in https://github.com/iNavFlight/inav/pull/8977
- Mark IFLIGHT_BLITZ_F7_AIO as SKIP_RELEASES by @mmosca in https://github.com/iNavFlight/inav/pull/8988
- Have you ever wished INAV had a mute switch? by @mmosca in https://github.com/iNavFlight/inav/pull/8989
- Enhance Linear Descent RTH feature by @MrD-RC in https://github.com/iNavFlight/inav/pull/8810
- updated battery profile documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9002
- INAV capitalization by @ryet9 in https://github.com/iNavFlight/inav/pull/9001
- Rename AUTO LEVEL by @MrD-RC in https://github.com/iNavFlight/inav/pull/8972
- fixed pitot sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9019
- modify servo and motor and magnetometer for AocodaRC F4V2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9040
- Release 6.1.0 mergeback by @DzikuVx in https://github.com/iNavFlight/inav/pull/8957
- Fix: SpeedyBee F405 V3 uSD card vs OSD interference by @shirase in https://github.com/iNavFlight/inav/pull/9028
- Update Navigation.md by @RomanLut in https://github.com/iNavFlight/inav/pull/9058
- Update Aocodarcf7mini by @dlt2018 in https://github.com/iNavFlight/inav/pull/9056
- Add MPU6000 and MPU6500 support to Foxeer F7 V4 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9070
- Cleanup abandoned EXTI code by @DzikuVx in https://github.com/iNavFlight/inav/pull/9071
- Multirotor WP speed fix when altitude enforce enabled by @breadoven in https://github.com/iNavFlight/inav/pull/9067
- Update target.h by @pgp69 in https://github.com/iNavFlight/inav/pull/9037
- updated controls documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9024
- remove obsolete static_assert by @stronnag in https://github.com/iNavFlight/inav/pull/9077
- [SITL OSX] Fix some of the warnings and add macosx SITL build to workflows by @mmosca in https://github.com/iNavFlight/inav/pull/9063
- Add QUADSPI Support for H7 and M25P16 Flash Driver by @mluessi in https://github.com/iNavFlight/inav/pull/8915
- Fix bug for DJI O3's altitude when using imperial by @MrD-RC in https://github.com/iNavFlight/inav/pull/9076
- Switch sensor infrastructure to be float internally by @DzikuVx in https://github.com/iNavFlight/inav/pull/9075
- [SITL] disable nagle for UART TCP by @stronnag in https://github.com/iNavFlight/inav/pull/9079
- [SITL OSX] Fix lldb debugging in OSX and improve OSX detection by @mmosca in https://github.com/iNavFlight/inav/pull/9082
- [SITL] consolidate IP helpers into target.c by @stronnag in https://github.com/iNavFlight/inav/pull/9080
- [SITL] add missing BSD header from IP consolidation by @stronnag in https://github.com/iNavFlight/inav/pull/9085
- [Docs] Readme updates by @stronnag in https://github.com/iNavFlight/inav/pull/9090
- Speedybee F405 WING fixes by @DzikuVx in https://github.com/iNavFlight/inav/pull/9094
- fix conflicting types by @stronnag in https://github.com/iNavFlight/inav/pull/9097
- allow HITL to run with HW baro failure by @RomanLut in https://github.com/iNavFlight/inav/pull/9021
- Set 10Hz update rate for M9 and M10 gps devices by default and allow higher refresh rates by @mmosca in https://github.com/iNavFlight/inav/pull/9103
- Add board Aocodarcf405aio by @dlt2018 in https://github.com/iNavFlight/inav/pull/9089
- Update Borad Aocodarch7dual by @dlt2018 in https://github.com/iNavFlight/inav/pull/9100
- DSP based gyro operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/9078
- Acc processing with DSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9116
- Remove brew update step for SITL mac build by @mmosca in https://github.com/iNavFlight/inav/pull/9127
- ICM42605 gyro parsing fix by @erstec in https://github.com/iNavFlight/inav/pull/9125
- Release 6.1.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9106
- Fix version check and apply GNSS configuration for M8+ gps by @mmosca in https://github.com/iNavFlight/inav/pull/9128
- Multirotor landing bump detection by @breadoven in https://github.com/iNavFlight/inav/pull/8744
- Add configuration of Beidou and Glonass to M8, M9 and M10 gps modules by @mmosca in https://github.com/iNavFlight/inav/pull/9124
- update gpsConfig_t PG version by @stronnag in https://github.com/iNavFlight/inav/pull/9131
- It looks like UBLOX ROM version 2.01 omits the = sign from PROTVER by @mmosca in https://github.com/iNavFlight/inav/pull/9132
- reenable LTO for MacOS firmware builds by @stronnag in https://github.com/iNavFlight/inav/pull/9136
- Flycolor F7 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9122
- updated buzzer documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9148
- fixed beeper -ON_USB for 1S setup, fixed beeper -SYSTEM_INIT by @RomanLut in https://github.com/iNavFlight/inav/pull/9147
- Enable possibility to simulate HW sensor failures in HITL by @RomanLut in https://github.com/iNavFlight/inav/pull/8858
- Kakute H7 Wing by @erstec in https://github.com/iNavFlight/inav/pull/9145
- Update target.h by @dlt2018 in https://github.com/iNavFlight/inav/pull/9151
- fix target's by @dlt2018 in https://github.com/iNavFlight/inav/pull/9149
- Improve OSD stats page avg efficiency value scaling by @rmaia3d in https://github.com/iNavFlight/inav/pull/9109
- Fix AOCODARCH7DUAL Buzzer continous beeping issue by @lida2003 in https://github.com/iNavFlight/inav/pull/9143
- [SITL] suppress spurious linker warning with gcc12+ by @stronnag in https://github.com/iNavFlight/inav/pull/9163
- How to test a pull request.md - two minor typos by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9170
- Add some documentation on how to test a PR by @mmosca in https://github.com/iNavFlight/inav/pull/9168
- fixed enter/exit camera osd stick positions docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9165
- Fix: Inav 7.0.0 last build not working on SPEEDYBEEF405V3 by @shirase in https://github.com/iNavFlight/inav/pull/9162
- Foxeer H743 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9171
- Add new OSD document by @MrD-RC in https://github.com/iNavFlight/inav/pull/9177
- Kakute H7 Wing Defaults altered by @erstec in https://github.com/iNavFlight/inav/pull/9185
- Add more baud rates to auto baud, as listed in m10 integration manual by @mmosca in https://github.com/iNavFlight/inav/pull/9174
- Use all 8 motor outputs on AXISFLYINGF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/9179
- MSP VTX support by @mmosca in https://github.com/iNavFlight/inav/pull/9166
- Repair led strip by @dlt2018 in https://github.com/iNavFlight/inav/pull/9190
- Get rid of some not needed floating point divisions by @DzikuVx in https://github.com/iNavFlight/inav/pull/9207
- Restore autobaud for m8 gps by @mmosca in https://github.com/iNavFlight/inav/pull/9219
- Update SPEEDYBEEF7V3. Fix Sensor VL53L1X by @druckgott in https://github.com/iNavFlight/inav/pull/9221
- Extend from 4 ADC channels to 6 (Matek H743 and others) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9180
- Nav altitude control improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8920
- fix neutronrcf435mini aio motor2 output bug by @shanggl in https://github.com/iNavFlight/inav/pull/9226
- Try to set vscode to play nice with formating style by @mmosca in https://github.com/iNavFlight/inav/pull/9223
- Fix for #9225, some OSD elements are skipped incorrectly, when GPS is not present. by @mmosca in https://github.com/iNavFlight/inav/pull/9229
- Block by Runtime calibration of ACC only when ACC is required by @DzikuVx in https://github.com/iNavFlight/inav/pull/9227
- Fix ADC on FOXEERH743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9230
- Update speedybeef405v3 docs, with some common issues by @mmosca in https://github.com/iNavFlight/inav/pull/9231
- Let M10 GPS disable SBAS and some small fixes changes by @mmosca in https://github.com/iNavFlight/inav/pull/9232
- Multicopter emergency landing improvement/fix by @breadoven in https://github.com/iNavFlight/inav/pull/9169
- Fix SITL memory leaks by @psmitty7373 in https://github.com/iNavFlight/inav/pull/9235
- Add constrain for DynLPF computation by @DzikuVx in https://github.com/iNavFlight/inav/pull/9242
- Multirotor Althold throttle hover option + altitude adjustment indication by @breadoven in https://github.com/iNavFlight/inav/pull/9220
- OSD Altitude field fix by @breadoven in https://github.com/iNavFlight/inav/pull/9261
- Add blackbox target heading + missing Nav auto enabled flight modes by @breadoven in https://github.com/iNavFlight/inav/pull/9249
- SKYSTARSH743HD remove non-existent S9 & S10. Add servos target by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9214
- [doc] update serial_printf document iaw current implementation by @stronnag in https://github.com/iNavFlight/inav/pull/9266
- Change motor/servo assignements for RUSH_BLADE_F7 targets by @mmosca in https://github.com/iNavFlight/inav/pull/9262
- Pitot DLVR-L10D sensor by @jmajew in https://github.com/iNavFlight/inav/pull/9216
- Add GEPRCF405 and GEPRCF722 targets by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9260
- Multi function OSD utility by @breadoven in https://github.com/iNavFlight/inav/pull/8698
- Timer DMA burst by @shirase in https://github.com/iNavFlight/inav/pull/9265
- Add mup6500 for mambaf405us by @jianwwpro in https://github.com/iNavFlight/inav/pull/8827
- Programming Frameword.md: Update to match Configurator renaming by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9275
- SpeedyBee F7 Mini V2 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9272
- Speedybee F405 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9273
- Multirotor course hold/cruise mode by @breadoven in https://github.com/iNavFlight/inav/pull/9213
- Bump navConfig PG that was forgotten in #9220 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9278
- Switch MatekF405TE to use burst DMA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9277
- Update Building in Windows 10 or 11 with Linux Subsystem.md by @wchnflr in https://github.com/iNavFlight/inav/pull/9279
- BETAFPVF435 unofficial target by @mmosca in https://github.com/iNavFlight/inav/pull/9281
- Make PWM allocation a bit smarter. by @mmosca in https://github.com/iNavFlight/inav/pull/9268
- [sitl] add --version, add git commit to version output by @stronnag in https://github.com/iNavFlight/inav/pull/9286
- docs/programming user21 typo by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9289
- Failsafe fixes by @breadoven in https://github.com/iNavFlight/inav/pull/9283
- Mixer throttle fixes/improvements + more OSD Throttle changes by @breadoven in https://github.com/iNavFlight/inav/pull/9274
- Ignore tasks.json and use tabs in C files by @MrD-RC in https://github.com/iNavFlight/inav/pull/9295
- Enable the virtual pitot by default by @MrD-RC in https://github.com/iNavFlight/inav/pull/9299
- Add DPS310 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9284
- Drop output_mode setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/9300
- Throttle related refactor/clean up by @breadoven in https://github.com/iNavFlight/inav/pull/9287
- docs/ipf: Fix typos and clarify wording by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9298
- Further simplify timer usage flags. by @mmosca in https://github.com/iNavFlight/inav/pull/9288
- Bulk update targets with new pwm output assignments by @mmosca in https://github.com/iNavFlight/inav/pull/9309
- Remove timer compatibility define, since all targets have been updated by @mmosca in https://github.com/iNavFlight/inav/pull/9318
- DSHOT delay fix by @shirase in https://github.com/iNavFlight/inav/pull/9321
- [docs] modernise Serial and RX documents by @stronnag in https://github.com/iNavFlight/inav/pull/9322
- Mixer profile to open the posibility for vtol/mixed platform by @shota3527 in https://github.com/iNavFlight/inav/pull/8555
- Add SouthPAN SBAS for all my friends in AU/NZ. by @mmosca in https://github.com/iNavFlight/inav/pull/9320
- Drop NMEA protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/9302
- SpeedyBee F405 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9324
- SpeedyBEEF405WING Change S11 timer, since TIM1 is used by LED by @mmosca in https://github.com/iNavFlight/inav/pull/9325
- Remove info about F3 mcus from Temperature sensors documentation by @mmosca in https://github.com/iNavFlight/inav/pull/9337
- Add Rate Dynamics to MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9336
- Update PR test instructions by @mmosca in https://github.com/iNavFlight/inav/pull/9338
- Flight remaining flight distance value by @MrD-RC in https://github.com/iNavFlight/inav/pull/9333
- Fix mixer config initialization sequence by @shota3527 in https://github.com/iNavFlight/inav/pull/9339
- Fix for Rate dynamics MSP layer by @DzikuVx in https://github.com/iNavFlight/inav/pull/9340
- Add myself to Authors by @mmosca in https://github.com/iNavFlight/inav/pull/9341
- Add odometer to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9335
- Update Controls.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9351
- IPF: Add yaw operand to go with pitch and roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9305
- Add MatekH743HD variant by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9244
- additional fixes for mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9363
- fixed HITL docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9353
- Add the Aocodarcf722aio file by @dlt2018 in https://github.com/iNavFlight/inav/pull/9314
- Lower default hover throttle to 30% by @mmosca in https://github.com/iNavFlight/inav/pull/9361
- Increase channels to 24 for Jeti by @MrD-RC in https://github.com/iNavFlight/inav/pull/9350
- Add pilot logo to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9332
- fixes servo output issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9366
- minor changes on ahrs by @shota3527 in https://github.com/iNavFlight/inav/pull/9360
- Timer N channel fix by @shirase in https://github.com/iNavFlight/inav/pull/9276
- Add ICM42605 driver for SKYSTARSF405HD by @DusKing1 in https://github.com/iNavFlight/inav/pull/9370
- Multirotor coursehold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9380
- Ez Tune for Multirotors by @DzikuVx in https://github.com/iNavFlight/inav/pull/9354
- update docker build scripts by @RomanLut in https://github.com/iNavFlight/inav/pull/9346
- Add SYM_TOTAL and SYM_GFORCE to BFCOMPAT by @mmosca in https://github.com/iNavFlight/inav/pull/9385
- In flight emergency rearm by @breadoven in https://github.com/iNavFlight/inav/pull/9254
- Re-enable baro. max chip seems to cause issues by @mmosca in https://github.com/iNavFlight/inav/pull/9400
- Make it easier to include all baro drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9394
- Make it easier to include all compass drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9401
- BFCOMPAT - improve wind and airspeed fields and labels by @rmaia3d in https://github.com/iNavFlight/inav/pull/9388
- HITL/SITL: allow hitl/sitl to arm with uncalibrated accelerometer by @RomanLut in https://github.com/iNavFlight/inav/pull/9345
- fix mixer_profie configurator issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9364
- flight/pid.c: fix AngleOverride(yaw) to degrees by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9329
- HITL: simulate battery voltage with any sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9212
- HITL: hd osd support by @RomanLut in https://github.com/iNavFlight/inav/pull/9327
- Fixed #9399 can't find baro chip on PB6/PB7 I2C1 by @lida2003 in https://github.com/iNavFlight/inav/pull/9412
- Fix JETI EXBUS overflow by @DzikuVx in https://github.com/iNavFlight/inav/pull/9407
- Disable ASFR function on ICM426xx driver by @DzikuVx in https://github.com/iNavFlight/inav/pull/9409
- 16G scale range for bmi270 accelerometer by @shota3527 in https://github.com/iNavFlight/inav/pull/9410
- tpa on yaw and i-term limit by @shota3527 in https://github.com/iNavFlight/inav/pull/9408
- FW Auto level trim bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9393
- Enhance mAh remaining OSD element by @MrD-RC in https://github.com/iNavFlight/inav/pull/9334
- Allow f722 to use mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9416
- Correct disarm servo throttle by @DzikuVx in https://github.com/iNavFlight/inav/pull/9413
- SAFETY issue -- servos.c: Correct servo throttle off when disarmed (not full throttle at disarm) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9330
- OSD Joystick by @RomanLut in https://github.com/iNavFlight/inav/pull/9201
- New target: ATOMRC Exceed F405 FC V2 by @NickB1 in https://github.com/iNavFlight/inav/pull/8956
- Add more power options for 1G3 group by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9243
- New target: SDMODELH7V1 by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9114
- Framework.md - Note about common error by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9422
- Update OSD.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9425
- comment on how to clone specific INAV releases added by @Daniel-1276 in https://github.com/iNavFlight/inav/pull/9414
- update vtol documents by @shota3527 in https://github.com/iNavFlight/inav/pull/9426
- Put getConfigMixerProfile as the last byte in message by @DzikuVx in https://github.com/iNavFlight/inav/pull/9431
- [GPS] fix Neo6M recognition by @stronnag in https://github.com/iNavFlight/inav/pull/9446
- Add DPS310 and SPL06 to FLYWOOF745 target by @mmosca in https://github.com/iNavFlight/inav/pull/9448
- Various PWM output changes. Mainly to get rid of potential conflicts by @DzikuVx in https://github.com/iNavFlight/inav/pull/9452
- Show system message when linear descent begins by @MrD-RC in https://github.com/iNavFlight/inav/pull/9453
- Fixed wing RC altitude adjustment fix by @breadoven in https://github.com/iNavFlight/inav/pull/9462
- Unable fo arm 3d esc rover by @mmosca in https://github.com/iNavFlight/inav/pull/9461
- Change the SPI of Mamba H743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9464
- Flywoof745 of der commented motor numbers by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9479
- Change speedybeeF7V3 default timer allocation by @mmosca in https://github.com/iNavFlight/inav/pull/9475
- Correct output order of FLYWOOF745 target to match BF and production board layout. by @mmosca in https://github.com/iNavFlight/inav/pull/9478
- TMOTORF7V2 has an optional baro, so add more drivers by @mmosca in https://github.com/iNavFlight/inav/pull/9465
- Revert "Enable the virtual pitot by default" by @DzikuVx in https://github.com/iNavFlight/inav/pull/9470
- AtomRC F405 DELUX by @DzikuVx in https://github.com/iNavFlight/inav/pull/9472
- Add FLYWOO new target "FLYWOOF405S_AIO" by @wchnflr in https://github.com/iNavFlight/inav/pull/9251
- FLYWOOF405S_AIO: rename CMakeLists by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9494
- DAKEFPVF722 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9496
- DAKEFPVF405 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9495
- fix hdzero channel settings over displayport by @error414 in https://github.com/iNavFlight/inav/pull/9486
New Contributors
- @HKR1987 made their first contribution in https://github.com/iNavFlight/inav/pull/8902
- @VasilKalchev made their first contribution in https://github.com/iNavFlight/inav/pull/8927
- @ryet9 made their first contribution in https://github.com/iNavFlight/inav/pull/9001
- @shirase made their first contribution in https://github.com/iNavFlight/inav/pull/9028
- @pgp69 made their first contribution in https://github.com/iNavFlight/inav/pull/9037
- @lida2003 made their first contribution in https://github.com/iNavFlight/inav/pull/9143
- @druckgott made their first contribution in https://github.com/iNavFlight/inav/pull/9221
- @psmitty7373 made their first contribution in https://github.com/iNavFlight/inav/pull/9235
- @jianwwpro made their first contribution in https://github.com/iNavFlight/inav/pull/8827
- @wchnflr made their first contribution in https://github.com/iNavFlight/inav/pull/9279
- @NickB1 made their first contribution in https://github.com/iNavFlight/inav/pull/8956
- @Daniel-1276 made their first contribution in https://github.com/iNavFlight/inav/pull/9414
- @error414 made their first contribution in https://github.com/iNavFlight/inav/pull/9486
Full Changelog: https://github.com/iNavFlight/inav/compare/6.1.1...7.0.0-RC3 Changelog: https://github.com/iNavFlight/inav/compare/7.0.0-RC2...7.0.0-RC3
7.0.0-RC2
6 months ago
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
-
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
| gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some receivers may limit the maximum number of satellites tracked when set to a higher rate or even stop sending navigation updates if the value is too high. Some M10 devices can do up to 25Hz. 10 is a safe value for M8 and newer. Values: 5 - 200 Default: 10 |
| gps_ublox_use_beidou | Enable use of Beidou satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps hardware support [OFF/ON]. Default: FALSE |
| gps_ublox_use_glonass | Enable use of Glonass satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps haardware support [OFF/ON]. Default: FALSE |
| led_pin_pwm_mode | PWM mode of LED pin. Values: SHARED_LOW, SHARED_HIGH, LOW, HIGH. Default: SHARED_LOW |
| mixer_automated_switch | If set to on, This mixer_profile will try to switch to another mixer_profile when 1.RTH heading home is requested and distance to home is lager than 3*nav_fw_loiter_radius on mixer_profile is a MULTIROTOR or TRICOPTER platform_type. 2. RTH landing is requested on this mixer_profile is a AIRPLANE platform_type Default: FALSE |
| mixer_pid_profile_linking | If enabled, pid profile_index will follow mixer_profile index. Set to OFF(default) if you want to handle PID profile by your self. Recommend to set to ON on all mixer_profiles to let the mixer_profile handle the PID profile switching on a VTOL or mixed platform type setup. Default: FALSE |
| mixer_switch_trans_timer | If switch another mixer_profile is scheduled by mixer_automated_switch or mixer_automated_switch. Activate Mixertransion motor/servo mixing for this many decisecond(0.1s) before the actual mixer_profile switch. Values: 0 - 200 Default: 0 |
| motorstop_on_low | If enabled, motor will stop when throttle is low on this mixer_profile Default: FALSE |
| nav_cruise_yaw_rate | Max YAW rate when NAV COURSE HOLD/CRUISE mode is enabled. Set to 0 to disable on fixed wing (Note: On multirotor setting to 0 will disable Course Hold/Cruise mode completely) [dps] Values: 0 - 120 Default: 20 |
| nav_landing_bump_detection | Allows immediate landing detection based on G bump at touchdown when set to ON. Requires a barometer and currently only works for multirotors. Default: FALSE |
| nav_mc_althold_throttle | If set to STICK the FC remembers the throttle stick position when enabling ALTHOLD and treats it as the neutral midpoint for holding altitude. If set to MID_STICK or HOVER the neutral midpoint is set to the mid stick position or the hover throttle position respectively. Default: STICK |
| nav_rth_linear_descent_start_distance | The distance [m] away from home to start the linear descent. 0 = immediately (original linear descent behaviour) Values: 0 - 10000 Default: 0 |
| nav_rth_use_linear_descent | If enabled, the aircraft will gradually descent to the nav_rth_home_altitude en route. The distance from home to start the descent can be set with nav_rth_linear_descent_start_distance. Default: FALSE |
| osd_arm_screen_display_time | Amount of time to display the arm screen [ms] Values: 1000 - 5000 Default: 1500 |
| osd_inav_to_pilot_logo_spacing | The space between the INAV and pilot logos, if osd_use_pilot_logo is ON. This number may be adjusted so that it fits the odd/even col width displays. For example, if using an odd column width display, such as Walksnail, and this is set to 4. 1 will be added so that the logos are equally spaced from the centre of the screen. Values: 0 - 20 Default: 8 |
| osd_joystick_down | PWM value for DOWN key Values: 0 - 100 Default: 0 |
| osd_joystick_enabled | Enable OSD Joystick emulation Default: FALSE |
| osd_joystick_enter | PWM value for ENTER key Values: 0 - 100 Default: 75 |
| osd_joystick_left | PWM value for LEFT key Values: 0 - 100 Default: 63 |
| osd_joystick_right | PWM value for RIGHT key Values: 0 - 100 Default: 28 |
| osd_joystick_up | PWM value for UP key Values: 0 - 100 Default: 48 |
| osd_mah_precision | Number of digits used for mAh precision. Currently used by mAh Used and Battery Remaining Capacity Values: 4 - 6 Default: 4 |
| osd_use_pilot_logo | Use custom pilot logo with/instead of the INAV logo. The pilot logo must be characters 473 to 511 Default: FALSE |
| pid_iterm_limit_percent | Limits max/min I-term value in stabilization PID controller. It solves the problem of servo saturation before take-off/throwing the airplane into the air. Or multirotors with low authority. By default, error accumulated in I-term can not exceed 33% of total pid throw (around 165us on deafult pidsum_limit of pitch/roll). Set 0 to disable completely. Values: 0 - 200 Default: 33 |
| tpa_on_yaw | Throttle PID attenuation also reduces influence on YAW for multi-rotor, Should be set to ON for tilting rotors. Default: FALSE |
Removed Items
| Name | Description |
|---|---|
| dterm_lpf2_hz | |
| dterm_lpf2_type | |
| frsky_coordinates_format | |
| frsky_default_latitude | |
| frsky_default_longitude | |
| frsky_unit | |
| frsky_vfas_precision | |
| fw_iterm_throw_limit | |
| moron_threshold | |
| nav_fw_cruise_yaw_rate | |
| nav_use_midthr_for_althold | |
| osd_mah_used_precision | |
| output_mode |
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 6.1.1
- INAV 7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8886
- Enable USE_SERVO_SBUS on all targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8876
- Release 6.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8763
- Drop D-term LPF2 as no longer used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8875
- Drop FrDky D-series telemetry support by @DzikuVx in https://github.com/iNavFlight/inav/pull/8878
- Allow scheduler to go down to 10us period by @DzikuVx in https://github.com/iNavFlight/inav/pull/8877
- Drop moron_threshold setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/8859
- Release 6.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8912
- Add target BLACKPILL_F411 by @HKR1987 in https://github.com/iNavFlight/inav/pull/8902
- Update GCC to 10.3.1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8917
- Release 6.1.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8887
- docs: fix documentation of gvar set by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8955
- Update Building in MSYS2 Doc by @pwnept in https://github.com/iNavFlight/inav/pull/8934
- Add osd menu option to preview font file by @mmosca in https://github.com/iNavFlight/inav/pull/8932
- Jh update usb flash doc by @stronnag in https://github.com/iNavFlight/inav/pull/8974
- Add the "GEPRCF722_BT_HD" target by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8943
- Recognize MPU9255 as a valid IMU by @VasilKalchev in https://github.com/iNavFlight/inav/pull/8927
- Cleanup m25p16 flash detection code by @mmosca in https://github.com/iNavFlight/inav/pull/8985
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/8987
- Add IFLIGHT_BLITZ_F7_AIO target by @mmosca in https://github.com/iNavFlight/inav/pull/8977
- Mark IFLIGHT_BLITZ_F7_AIO as SKIP_RELEASES by @mmosca in https://github.com/iNavFlight/inav/pull/8988
- Have you ever wished INAV had a mute switch? by @mmosca in https://github.com/iNavFlight/inav/pull/8989
- Enhance Linear Descent RTH feature by @MrD-RC in https://github.com/iNavFlight/inav/pull/8810
- updated battery profile documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9002
- INAV capitalization by @ryet9 in https://github.com/iNavFlight/inav/pull/9001
- Rename AUTO LEVEL by @MrD-RC in https://github.com/iNavFlight/inav/pull/8972
- fixed pitot sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9019
- modify servo and motor and magnetometer for AocodaRC F4V2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9040
- Release 6.1.0 mergeback by @DzikuVx in https://github.com/iNavFlight/inav/pull/8957
- Fix: SpeedyBee F405 V3 uSD card vs OSD interference by @shirase in https://github.com/iNavFlight/inav/pull/9028
- Update Navigation.md by @RomanLut in https://github.com/iNavFlight/inav/pull/9058
- Update Aocodarcf7mini by @dlt2018 in https://github.com/iNavFlight/inav/pull/9056
- Add MPU6000 and MPU6500 support to Foxeer F7 V4 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9070
- Cleanup abandoned EXTI code by @DzikuVx in https://github.com/iNavFlight/inav/pull/9071
- Multirotor WP speed fix when altitude enforce enabled by @breadoven in https://github.com/iNavFlight/inav/pull/9067
- Update target.h by @pgp69 in https://github.com/iNavFlight/inav/pull/9037
- updated controls documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9024
- remove obsolete static_assert by @stronnag in https://github.com/iNavFlight/inav/pull/9077
- [SITL OSX] Fix some of the warnings and add macosx SITL build to workflows by @mmosca in https://github.com/iNavFlight/inav/pull/9063
- Add QUADSPI Support for H7 and M25P16 Flash Driver by @mluessi in https://github.com/iNavFlight/inav/pull/8915
- Fix bug for DJI O3's altitude when using imperial by @MrD-RC in https://github.com/iNavFlight/inav/pull/9076
- Switch sensor infrastructure to be float internally by @DzikuVx in https://github.com/iNavFlight/inav/pull/9075
- [SITL] disable nagle for UART TCP by @stronnag in https://github.com/iNavFlight/inav/pull/9079
- [SITL OSX] Fix lldb debugging in OSX and improve OSX detection by @mmosca in https://github.com/iNavFlight/inav/pull/9082
- [SITL] consolidate IP helpers into target.c by @stronnag in https://github.com/iNavFlight/inav/pull/9080
- [SITL] add missing BSD header from IP consolidation by @stronnag in https://github.com/iNavFlight/inav/pull/9085
- [Docs] Readme updates by @stronnag in https://github.com/iNavFlight/inav/pull/9090
- Speedybee F405 WING fixes by @DzikuVx in https://github.com/iNavFlight/inav/pull/9094
- fix conflicting types by @stronnag in https://github.com/iNavFlight/inav/pull/9097
- allow HITL to run with HW baro failure by @RomanLut in https://github.com/iNavFlight/inav/pull/9021
- Set 10Hz update rate for M9 and M10 gps devices by default and allow higher refresh rates by @mmosca in https://github.com/iNavFlight/inav/pull/9103
- Add board Aocodarcf405aio by @dlt2018 in https://github.com/iNavFlight/inav/pull/9089
- Update Borad Aocodarch7dual by @dlt2018 in https://github.com/iNavFlight/inav/pull/9100
- DSP based gyro operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/9078
- Acc processing with DSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9116
- Remove brew update step for SITL mac build by @mmosca in https://github.com/iNavFlight/inav/pull/9127
- ICM42605 gyro parsing fix by @erstec in https://github.com/iNavFlight/inav/pull/9125
- Release 6.1.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9106
- Fix version check and apply GNSS configuration for M8+ gps by @mmosca in https://github.com/iNavFlight/inav/pull/9128
- Multirotor landing bump detection by @breadoven in https://github.com/iNavFlight/inav/pull/8744
- Add configuration of Beidou and Glonass to M8, M9 and M10 gps modules by @mmosca in https://github.com/iNavFlight/inav/pull/9124
- update gpsConfig_t PG version by @stronnag in https://github.com/iNavFlight/inav/pull/9131
- It looks like UBLOX ROM version 2.01 omits the = sign from PROTVER by @mmosca in https://github.com/iNavFlight/inav/pull/9132
- reenable LTO for MacOS firmware builds by @stronnag in https://github.com/iNavFlight/inav/pull/9136
- Flycolor F7 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9122
- updated buzzer documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9148
- fixed beeper -ON_USB for 1S setup, fixed beeper -SYSTEM_INIT by @RomanLut in https://github.com/iNavFlight/inav/pull/9147
- Enable possibility to simulate HW sensor failures in HITL by @RomanLut in https://github.com/iNavFlight/inav/pull/8858
- Kakute H7 Wing by @erstec in https://github.com/iNavFlight/inav/pull/9145
- Update target.h by @dlt2018 in https://github.com/iNavFlight/inav/pull/9151
- fix target's by @dlt2018 in https://github.com/iNavFlight/inav/pull/9149
- Improve OSD stats page avg efficiency value scaling by @rmaia3d in https://github.com/iNavFlight/inav/pull/9109
- Fix AOCODARCH7DUAL Buzzer continous beeping issue by @lida2003 in https://github.com/iNavFlight/inav/pull/9143
- [SITL] suppress spurious linker warning with gcc12+ by @stronnag in https://github.com/iNavFlight/inav/pull/9163
- How to test a pull request.md - two minor typos by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9170
- Add some documentation on how to test a PR by @mmosca in https://github.com/iNavFlight/inav/pull/9168
- fixed enter/exit camera osd stick positions docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9165
- Fix: Inav 7.0.0 last build not working on SPEEDYBEEF405V3 by @shirase in https://github.com/iNavFlight/inav/pull/9162
- Foxeer H743 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9171
- Add new OSD document by @MrD-RC in https://github.com/iNavFlight/inav/pull/9177
- Kakute H7 Wing Defaults altered by @erstec in https://github.com/iNavFlight/inav/pull/9185
- Add more baud rates to auto baud, as listed in m10 integration manual by @mmosca in https://github.com/iNavFlight/inav/pull/9174
- Use all 8 motor outputs on AXISFLYINGF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/9179
- MSP VTX support by @mmosca in https://github.com/iNavFlight/inav/pull/9166
- Repair led strip by @dlt2018 in https://github.com/iNavFlight/inav/pull/9190
- Get rid of some not needed floating point divisions by @DzikuVx in https://github.com/iNavFlight/inav/pull/9207
- Restore autobaud for m8 gps by @mmosca in https://github.com/iNavFlight/inav/pull/9219
- Update SPEEDYBEEF7V3. Fix Sensor VL53L1X by @druckgott in https://github.com/iNavFlight/inav/pull/9221
- Extend from 4 ADC channels to 6 (Matek H743 and others) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9180
- Nav altitude control improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8920
- fix neutronrcf435mini aio motor2 output bug by @shanggl in https://github.com/iNavFlight/inav/pull/9226
- Try to set vscode to play nice with formating style by @mmosca in https://github.com/iNavFlight/inav/pull/9223
- Fix for #9225, some OSD elements are skipped incorrectly, when GPS is not present. by @mmosca in https://github.com/iNavFlight/inav/pull/9229
- Block by Runtime calibration of ACC only when ACC is required by @DzikuVx in https://github.com/iNavFlight/inav/pull/9227
- Fix ADC on FOXEERH743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9230
- Update speedybeef405v3 docs, with some common issues by @mmosca in https://github.com/iNavFlight/inav/pull/9231
- Let M10 GPS disable SBAS and some small fixes changes by @mmosca in https://github.com/iNavFlight/inav/pull/9232
- Multicopter emergency landing improvement/fix by @breadoven in https://github.com/iNavFlight/inav/pull/9169
- Fix SITL memory leaks by @psmitty7373 in https://github.com/iNavFlight/inav/pull/9235
- Add constrain for DynLPF computation by @DzikuVx in https://github.com/iNavFlight/inav/pull/9242
- Multirotor Althold throttle hover option + altitude adjustment indication by @breadoven in https://github.com/iNavFlight/inav/pull/9220
- OSD Altitude field fix by @breadoven in https://github.com/iNavFlight/inav/pull/9261
- Add blackbox target heading + missing Nav auto enabled flight modes by @breadoven in https://github.com/iNavFlight/inav/pull/9249
- SKYSTARSH743HD remove non-existent S9 & S10. Add servos target by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9214
- [doc] update serial_printf document iaw current implementation by @stronnag in https://github.com/iNavFlight/inav/pull/9266
- Change motor/servo assignements for RUSH_BLADE_F7 targets by @mmosca in https://github.com/iNavFlight/inav/pull/9262
- Pitot DLVR-L10D sensor by @jmajew in https://github.com/iNavFlight/inav/pull/9216
- Add GEPRCF405 and GEPRCF722 targets by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9260
- Multi function OSD utility by @breadoven in https://github.com/iNavFlight/inav/pull/8698
- Timer DMA burst by @shirase in https://github.com/iNavFlight/inav/pull/9265
- Add mup6500 for mambaf405us by @jianwwpro in https://github.com/iNavFlight/inav/pull/8827
- Programming Frameword.md: Update to match Configurator renaming by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9275
- SpeedyBee F7 Mini V2 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9272
- Speedybee F405 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9273
- Multirotor course hold/cruise mode by @breadoven in https://github.com/iNavFlight/inav/pull/9213
- Bump navConfig PG that was forgotten in #9220 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9278
- Switch MatekF405TE to use burst DMA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9277
- Update Building in Windows 10 or 11 with Linux Subsystem.md by @wchnflr in https://github.com/iNavFlight/inav/pull/9279
- BETAFPVF435 unofficial target by @mmosca in https://github.com/iNavFlight/inav/pull/9281
- Make PWM allocation a bit smarter. by @mmosca in https://github.com/iNavFlight/inav/pull/9268
- [sitl] add --version, add git commit to version output by @stronnag in https://github.com/iNavFlight/inav/pull/9286
- docs/programming user21 typo by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9289
- Failsafe fixes by @breadoven in https://github.com/iNavFlight/inav/pull/9283
- Mixer throttle fixes/improvements + more OSD Throttle changes by @breadoven in https://github.com/iNavFlight/inav/pull/9274
- Ignore tasks.json and use tabs in C files by @MrD-RC in https://github.com/iNavFlight/inav/pull/9295
- Enable the virtual pitot by default by @MrD-RC in https://github.com/iNavFlight/inav/pull/9299
- Add DPS310 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9284
- Drop output_mode setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/9300
- Throttle related refactor/clean up by @breadoven in https://github.com/iNavFlight/inav/pull/9287
- docs/ipf: Fix typos and clarify wording by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9298
- Further simplify timer usage flags. by @mmosca in https://github.com/iNavFlight/inav/pull/9288
- Bulk update targets with new pwm output assignments by @mmosca in https://github.com/iNavFlight/inav/pull/9309
- Remove timer compatibility define, since all targets have been updated by @mmosca in https://github.com/iNavFlight/inav/pull/9318
- DSHOT delay fix by @shirase in https://github.com/iNavFlight/inav/pull/9321
- [docs] modernise Serial and RX documents by @stronnag in https://github.com/iNavFlight/inav/pull/9322
- Mixer profile to open the posibility for vtol/mixed platform by @shota3527 in https://github.com/iNavFlight/inav/pull/8555
- Add SouthPAN SBAS for all my friends in AU/NZ. by @mmosca in https://github.com/iNavFlight/inav/pull/9320
- Drop NMEA protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/9302
- SpeedyBee F405 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9324
- SpeedyBEEF405WING Change S11 timer, since TIM1 is used by LED by @mmosca in https://github.com/iNavFlight/inav/pull/9325
- Remove info about F3 mcus from Temperature sensors documentation by @mmosca in https://github.com/iNavFlight/inav/pull/9337
- Add Rate Dynamics to MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9336
- Update PR test instructions by @mmosca in https://github.com/iNavFlight/inav/pull/9338
- Flight remaining flight distance value by @MrD-RC in https://github.com/iNavFlight/inav/pull/9333
- Fix mixer config initialization sequence by @shota3527 in https://github.com/iNavFlight/inav/pull/9339
- Fix for Rate dynamics MSP layer by @DzikuVx in https://github.com/iNavFlight/inav/pull/9340
- Add myself to Authors by @mmosca in https://github.com/iNavFlight/inav/pull/9341
- Add odometer to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9335
- Update Controls.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9351
- IPF: Add yaw operand to go with pitch and roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9305
- Add MatekH743HD variant by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9244
- additional fixes for mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9363
- fixed HITL docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9353
- Add the Aocodarcf722aio file by @dlt2018 in https://github.com/iNavFlight/inav/pull/9314
- Lower default hover throttle to 30% by @mmosca in https://github.com/iNavFlight/inav/pull/9361
- Increase channels to 24 for Jeti by @MrD-RC in https://github.com/iNavFlight/inav/pull/9350
- Add pilot logo to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9332
- fixes servo output issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9366
- minor changes on ahrs by @shota3527 in https://github.com/iNavFlight/inav/pull/9360
- Timer N channel fix by @shirase in https://github.com/iNavFlight/inav/pull/9276
- Add ICM42605 driver for SKYSTARSF405HD by @DusKing1 in https://github.com/iNavFlight/inav/pull/9370
- Multirotor coursehold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9380
- Ez Tune for Multirotors by @DzikuVx in https://github.com/iNavFlight/inav/pull/9354
- update docker build scripts by @RomanLut in https://github.com/iNavFlight/inav/pull/9346
- Add SYM_TOTAL and SYM_GFORCE to BFCOMPAT by @mmosca in https://github.com/iNavFlight/inav/pull/9385
- In flight emergency rearm by @breadoven in https://github.com/iNavFlight/inav/pull/9254
- Re-enable baro. max chip seems to cause issues by @mmosca in https://github.com/iNavFlight/inav/pull/9400
- Make it easier to include all baro drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9394
- Make it easier to include all compass drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9401
- BFCOMPAT - improve wind and airspeed fields and labels by @rmaia3d in https://github.com/iNavFlight/inav/pull/9388
- HITL/SITL: allow hitl/sitl to arm with uncalibrated accelerometer by @RomanLut in https://github.com/iNavFlight/inav/pull/9345
- fix mixer_profie configurator issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9364
- flight/pid.c: fix AngleOverride(yaw) to degrees by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9329
- HITL: simulate battery voltage with any sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9212
- HITL: hd osd support by @RomanLut in https://github.com/iNavFlight/inav/pull/9327
- Fixed #9399 can't find baro chip on PB6/PB7 I2C1 by @lida2003 in https://github.com/iNavFlight/inav/pull/9412
- Fix JETI EXBUS overflow by @DzikuVx in https://github.com/iNavFlight/inav/pull/9407
- Disable ASFR function on ICM426xx driver by @DzikuVx in https://github.com/iNavFlight/inav/pull/9409
- 16G scale range for bmi270 accelerometer by @shota3527 in https://github.com/iNavFlight/inav/pull/9410
- tpa on yaw and i-term limit by @shota3527 in https://github.com/iNavFlight/inav/pull/9408
- FW Auto level trim bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9393
- Enhance mAh remaining OSD element by @MrD-RC in https://github.com/iNavFlight/inav/pull/9334
- Allow f722 to use mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9416
- Correct disarm servo throttle by @DzikuVx in https://github.com/iNavFlight/inav/pull/9413
- SAFETY issue -- servos.c: Correct servo throttle off when disarmed (not full throttle at disarm) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9330
- OSD Joystick by @RomanLut in https://github.com/iNavFlight/inav/pull/9201
- New target: ATOMRC Exceed F405 FC V2 by @NickB1 in https://github.com/iNavFlight/inav/pull/8956
- Add more power options for 1G3 group by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9243
- New target: SDMODELH7V1 by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9114
- Framework.md - Note about common error by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9422
- Update OSD.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9425
- comment on how to clone specific INAV releases added by @Daniel-1276 in https://github.com/iNavFlight/inav/pull/9414
- update vtol documents by @shota3527 in https://github.com/iNavFlight/inav/pull/9426
- Put getConfigMixerProfile as the last byte in message by @DzikuVx in https://github.com/iNavFlight/inav/pull/9431
- [GPS] fix Neo6M recognition by @stronnag in https://github.com/iNavFlight/inav/pull/9446
- Add DPS310 and SPL06 to FLYWOOF745 target by @mmosca in https://github.com/iNavFlight/inav/pull/9448
- Various PWM output changes. Mainly to get rid of potential conflicts by @DzikuVx in https://github.com/iNavFlight/inav/pull/9452
- Show system message when linear descent begins by @MrD-RC in https://github.com/iNavFlight/inav/pull/9453
New Contributors
- @HKR1987 made their first contribution in https://github.com/iNavFlight/inav/pull/8902
- @VasilKalchev made their first contribution in https://github.com/iNavFlight/inav/pull/8927
- @ryet9 made their first contribution in https://github.com/iNavFlight/inav/pull/9001
- @shirase made their first contribution in https://github.com/iNavFlight/inav/pull/9028
- @pgp69 made their first contribution in https://github.com/iNavFlight/inav/pull/9037
- @lida2003 made their first contribution in https://github.com/iNavFlight/inav/pull/9143
- @druckgott made their first contribution in https://github.com/iNavFlight/inav/pull/9221
- @psmitty7373 made their first contribution in https://github.com/iNavFlight/inav/pull/9235
- @jianwwpro made their first contribution in https://github.com/iNavFlight/inav/pull/8827
- @wchnflr made their first contribution in https://github.com/iNavFlight/inav/pull/9279
- @NickB1 made their first contribution in https://github.com/iNavFlight/inav/pull/8956
- @Daniel-1276 made their first contribution in https://github.com/iNavFlight/inav/pull/9414
Full Changelog: https://github.com/iNavFlight/inav/compare/6.1.1...7.0.0-RC2 Changelog: https://github.com/iNavFlight/inav/compare/7.0.0-RC1...7.0.0-RC2
7.0.0-RC1
6 months ago
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in https://github.com/betaflight/betaflight/pull/13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
-
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
| gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some receivers may limit the maximum number of satellites tracked when set to a higher rate or even stop sending navigation updates if the value is too high. Some M10 devices can do up to 25Hz. 10 is a safe value for M8 and newer. Values: 5 - 200 Default: 10 |
| gps_ublox_use_beidou | Enable use of Beidou satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps hardware support [OFF/ON]. Default: FALSE |
| gps_ublox_use_glonass | Enable use of Glonass satellites. This is at the expense of other regional constellations, so benefit may also be regional. Requires gps haardware support [OFF/ON]. Default: FALSE |
| led_pin_pwm_mode | PWM mode of LED pin. Values: SHARED_LOW, SHARED_HIGH, LOW, HIGH. Default: SHARED_LOW |
| mixer_automated_switch | If set to on, This mixer_profile will try to switch to another mixer_profile when 1.RTH heading home is requested and distance to home is lager than 3*nav_fw_loiter_radius on mixer_profile is a MULTIROTOR or TRICOPTER platform_type. 2. RTH landing is requested on this mixer_profile is a AIRPLANE platform_type Default: FALSE |
| mixer_pid_profile_linking | If enabled, pid profile_index will follow mixer_profile index. Set to OFF(default) if you want to handle PID profile by your self. Recommend to set to ON on all mixer_profiles to let the mixer_profile handle the PID profile switching on a VTOL or mixed platform type setup. Default: FALSE |
| mixer_switch_trans_timer | If switch another mixer_profile is scheduled by mixer_automated_switch or mixer_automated_switch. Activate Mixertransion motor/servo mixing for this many decisecond(0.1s) before the actual mixer_profile switch. Values: 0 - 200 Default: 0 |
| motorstop_on_low | If enabled, motor will stop when throttle is low on this mixer_profile Default: FALSE |
| nav_cruise_yaw_rate | Max YAW rate when NAV COURSE HOLD/CRUISE mode is enabled. Set to 0 to disable on fixed wing (Note: On multirotor setting to 0 will disable Course Hold/Cruise mode completely) [dps] Values: 0 - 120 Default: 20 |
| nav_landing_bump_detection | Allows immediate landing detection based on G bump at touchdown when set to ON. Requires a barometer and currently only works for multirotors. Default: FALSE |
| nav_mc_althold_throttle | If set to STICK the FC remembers the throttle stick position when enabling ALTHOLD and treats it as the neutral midpoint for holding altitude. If set to MID_STICK or HOVER the neutral midpoint is set to the mid stick position or the hover throttle position respectively. Default: STICK |
| nav_rth_linear_descent_start_distance | The distance [m] away from home to start the linear descent. 0 = immediately (original linear descent behaviour) Values: 0 - 10000 Default: 0 |
| nav_rth_use_linear_descent | If enabled, the aircraft will gradually descent to the nav_rth_home_altitude en route. The distance from home to start the descent can be set with nav_rth_linear_descent_start_distance. Default: FALSE |
| osd_arm_screen_display_time | Amount of time to display the arm screen [ms] Values: 1000 - 5000 Default: 1500 |
| osd_inav_to_pilot_logo_spacing | The space between the INAV and pilot logos, if osd_use_pilot_logo is ON. This number may be adjusted so that it fits the odd/even col width displays. For example, if using an odd column width display, such as Walksnail, and this is set to 4. 1 will be added so that the logos are equally spaced from the centre of the screen. Values: 0 - 20 Default: 8 |
| osd_joystick_down | PWM value for DOWN key Values: 0 - 100 Default: 0 |
| osd_joystick_enabled | Enable OSD Joystick emulation Default: FALSE |
| osd_joystick_enter | PWM value for ENTER key Values: 0 - 100 Default: 75 |
| osd_joystick_left | PWM value for LEFT key Values: 0 - 100 Default: 63 |
| osd_joystick_right | PWM value for RIGHT key Values: 0 - 100 Default: 28 |
| osd_joystick_up | PWM value for UP key Values: 0 - 100 Default: 48 |
| osd_mah_precision | Number of digits used for mAh precision. Currently used by mAh Used and Battery Remaining Capacity Values: 4 - 6 Default: 4 |
| osd_use_pilot_logo | Use custom pilot logo with/instead of the INAV logo. The pilot logo must be characters 473 to 511 Default: FALSE |
| pid_iterm_limit_percent | Limits max/min I-term value in stabilization PID controller. It solves the problem of servo saturation before take-off/throwing the airplane into the air. Or multirotors with low authority. By default, error accumulated in I-term can not exceed 33% of total pid throw (around 165us on deafult pidsum_limit of pitch/roll). Set 0 to disable completely. Values: 0 - 200 Default: 33 |
| tpa_on_yaw | Throttle PID attenuation also reduces influence on YAW for multi-rotor, Should be set to ON for tilting rotors. Default: FALSE |
Removed Items
| Name | Description |
|---|---|
| dterm_lpf2_hz | |
| dterm_lpf2_type | |
| frsky_coordinates_format | |
| frsky_default_latitude | |
| frsky_default_longitude | |
| frsky_unit | |
| frsky_vfas_precision | |
| fw_iterm_throw_limit | |
| moron_threshold | |
| nav_fw_cruise_yaw_rate | |
| nav_use_midthr_for_althold | |
| osd_mah_used_precision | |
| output_mode |
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 6.1.1
- INAV 7 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8886
- Enable USE_SERVO_SBUS on all targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8876
- Release 6.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8763
- Drop D-term LPF2 as no longer used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8875
- Drop FrDky D-series telemetry support by @DzikuVx in https://github.com/iNavFlight/inav/pull/8878
- Allow scheduler to go down to 10us period by @DzikuVx in https://github.com/iNavFlight/inav/pull/8877
- Drop moron_threshold setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/8859
- Release 6.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8912
- Add target BLACKPILL_F411 by @HKR1987 in https://github.com/iNavFlight/inav/pull/8902
- Update GCC to 10.3.1 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8917
- Release 6.1.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8887
- docs: fix documentation of gvar set by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8955
- Update Building in MSYS2 Doc by @pwnept in https://github.com/iNavFlight/inav/pull/8934
- Add osd menu option to preview font file by @mmosca in https://github.com/iNavFlight/inav/pull/8932
- Jh update usb flash doc by @stronnag in https://github.com/iNavFlight/inav/pull/8974
- Add the "GEPRCF722_BT_HD" target by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8943
- Recognize MPU9255 as a valid IMU by @VasilKalchev in https://github.com/iNavFlight/inav/pull/8927
- Cleanup m25p16 flash detection code by @mmosca in https://github.com/iNavFlight/inav/pull/8985
- Update from master by @MrD-RC in https://github.com/iNavFlight/inav/pull/8987
- Add IFLIGHT_BLITZ_F7_AIO target by @mmosca in https://github.com/iNavFlight/inav/pull/8977
- Mark IFLIGHT_BLITZ_F7_AIO as SKIP_RELEASES by @mmosca in https://github.com/iNavFlight/inav/pull/8988
- Have you ever wished INAV had a mute switch? by @mmosca in https://github.com/iNavFlight/inav/pull/8989
- Enhance Linear Descent RTH feature by @MrD-RC in https://github.com/iNavFlight/inav/pull/8810
- updated battery profile documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9002
- INAV capitalization by @ryet9 in https://github.com/iNavFlight/inav/pull/9001
- Rename AUTO LEVEL by @MrD-RC in https://github.com/iNavFlight/inav/pull/8972
- fixed pitot sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9019
- modify servo and motor and magnetometer for AocodaRC F4V2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9040
- Release 6.1.0 mergeback by @DzikuVx in https://github.com/iNavFlight/inav/pull/8957
- Fix: SpeedyBee F405 V3 uSD card vs OSD interference by @shirase in https://github.com/iNavFlight/inav/pull/9028
- Update Navigation.md by @RomanLut in https://github.com/iNavFlight/inav/pull/9058
- Update Aocodarcf7mini by @dlt2018 in https://github.com/iNavFlight/inav/pull/9056
- Add MPU6000 and MPU6500 support to Foxeer F7 V4 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9070
- Cleanup abandoned EXTI code by @DzikuVx in https://github.com/iNavFlight/inav/pull/9071
- Multirotor WP speed fix when altitude enforce enabled by @breadoven in https://github.com/iNavFlight/inav/pull/9067
- Update target.h by @pgp69 in https://github.com/iNavFlight/inav/pull/9037
- updated controls documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9024
- remove obsolete static_assert by @stronnag in https://github.com/iNavFlight/inav/pull/9077
- [SITL OSX] Fix some of the warnings and add macosx SITL build to workflows by @mmosca in https://github.com/iNavFlight/inav/pull/9063
- Add QUADSPI Support for H7 and M25P16 Flash Driver by @mluessi in https://github.com/iNavFlight/inav/pull/8915
- Fix bug for DJI O3's altitude when using imperial by @MrD-RC in https://github.com/iNavFlight/inav/pull/9076
- Switch sensor infrastructure to be float internally by @DzikuVx in https://github.com/iNavFlight/inav/pull/9075
- [SITL] disable nagle for UART TCP by @stronnag in https://github.com/iNavFlight/inav/pull/9079
- [SITL OSX] Fix lldb debugging in OSX and improve OSX detection by @mmosca in https://github.com/iNavFlight/inav/pull/9082
- [SITL] consolidate IP helpers into target.c by @stronnag in https://github.com/iNavFlight/inav/pull/9080
- [SITL] add missing BSD header from IP consolidation by @stronnag in https://github.com/iNavFlight/inav/pull/9085
- [Docs] Readme updates by @stronnag in https://github.com/iNavFlight/inav/pull/9090
- Speedybee F405 WING fixes by @DzikuVx in https://github.com/iNavFlight/inav/pull/9094
- fix conflicting types by @stronnag in https://github.com/iNavFlight/inav/pull/9097
- allow HITL to run with HW baro failure by @RomanLut in https://github.com/iNavFlight/inav/pull/9021
- Set 10Hz update rate for M9 and M10 gps devices by default and allow higher refresh rates by @mmosca in https://github.com/iNavFlight/inav/pull/9103
- Add board Aocodarcf405aio by @dlt2018 in https://github.com/iNavFlight/inav/pull/9089
- Update Borad Aocodarch7dual by @dlt2018 in https://github.com/iNavFlight/inav/pull/9100
- DSP based gyro operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/9078
- Acc processing with DSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9116
- Remove brew update step for SITL mac build by @mmosca in https://github.com/iNavFlight/inav/pull/9127
- ICM42605 gyro parsing fix by @erstec in https://github.com/iNavFlight/inav/pull/9125
- Release 6.1.1 by @MrD-RC in https://github.com/iNavFlight/inav/pull/9106
- Fix version check and apply GNSS configuration for M8+ gps by @mmosca in https://github.com/iNavFlight/inav/pull/9128
- Multirotor landing bump detection by @breadoven in https://github.com/iNavFlight/inav/pull/8744
- Add configuration of Beidou and Glonass to M8, M9 and M10 gps modules by @mmosca in https://github.com/iNavFlight/inav/pull/9124
- update gpsConfig_t PG version by @stronnag in https://github.com/iNavFlight/inav/pull/9131
- It looks like UBLOX ROM version 2.01 omits the = sign from PROTVER by @mmosca in https://github.com/iNavFlight/inav/pull/9132
- reenable LTO for MacOS firmware builds by @stronnag in https://github.com/iNavFlight/inav/pull/9136
- Flycolor F7 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9122
- updated buzzer documentation by @RomanLut in https://github.com/iNavFlight/inav/pull/9148
- fixed beeper -ON_USB for 1S setup, fixed beeper -SYSTEM_INIT by @RomanLut in https://github.com/iNavFlight/inav/pull/9147
- Enable possibility to simulate HW sensor failures in HITL by @RomanLut in https://github.com/iNavFlight/inav/pull/8858
- Kakute H7 Wing by @erstec in https://github.com/iNavFlight/inav/pull/9145
- Update target.h by @dlt2018 in https://github.com/iNavFlight/inav/pull/9151
- fix target's by @dlt2018 in https://github.com/iNavFlight/inav/pull/9149
- Improve OSD stats page avg efficiency value scaling by @rmaia3d in https://github.com/iNavFlight/inav/pull/9109
- Fix AOCODARCH7DUAL Buzzer continous beeping issue by @lida2003 in https://github.com/iNavFlight/inav/pull/9143
- [SITL] suppress spurious linker warning with gcc12+ by @stronnag in https://github.com/iNavFlight/inav/pull/9163
- How to test a pull request.md - two minor typos by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9170
- Add some documentation on how to test a PR by @mmosca in https://github.com/iNavFlight/inav/pull/9168
- fixed enter/exit camera osd stick positions docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9165
- Fix: Inav 7.0.0 last build not working on SPEEDYBEEF405V3 by @shirase in https://github.com/iNavFlight/inav/pull/9162
- Foxeer H743 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9171
- Add new OSD document by @MrD-RC in https://github.com/iNavFlight/inav/pull/9177
- Kakute H7 Wing Defaults altered by @erstec in https://github.com/iNavFlight/inav/pull/9185
- Add more baud rates to auto baud, as listed in m10 integration manual by @mmosca in https://github.com/iNavFlight/inav/pull/9174
- Use all 8 motor outputs on AXISFLYINGF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/9179
- MSP VTX support by @mmosca in https://github.com/iNavFlight/inav/pull/9166
- Repair led strip by @dlt2018 in https://github.com/iNavFlight/inav/pull/9190
- Get rid of some not needed floating point divisions by @DzikuVx in https://github.com/iNavFlight/inav/pull/9207
- Restore autobaud for m8 gps by @mmosca in https://github.com/iNavFlight/inav/pull/9219
- Update SPEEDYBEEF7V3. Fix Sensor VL53L1X by @druckgott in https://github.com/iNavFlight/inav/pull/9221
- Extend from 4 ADC channels to 6 (Matek H743 and others) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9180
- Nav altitude control improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8920
- fix neutronrcf435mini aio motor2 output bug by @shanggl in https://github.com/iNavFlight/inav/pull/9226
- Try to set vscode to play nice with formating style by @mmosca in https://github.com/iNavFlight/inav/pull/9223
- Fix for #9225, some OSD elements are skipped incorrectly, when GPS is not present. by @mmosca in https://github.com/iNavFlight/inav/pull/9229
- Block by Runtime calibration of ACC only when ACC is required by @DzikuVx in https://github.com/iNavFlight/inav/pull/9227
- Fix ADC on FOXEERH743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9230
- Update speedybeef405v3 docs, with some common issues by @mmosca in https://github.com/iNavFlight/inav/pull/9231
- Let M10 GPS disable SBAS and some small fixes changes by @mmosca in https://github.com/iNavFlight/inav/pull/9232
- Multicopter emergency landing improvement/fix by @breadoven in https://github.com/iNavFlight/inav/pull/9169
- Fix SITL memory leaks by @psmitty7373 in https://github.com/iNavFlight/inav/pull/9235
- Add constrain for DynLPF computation by @DzikuVx in https://github.com/iNavFlight/inav/pull/9242
- Multirotor Althold throttle hover option + altitude adjustment indication by @breadoven in https://github.com/iNavFlight/inav/pull/9220
- OSD Altitude field fix by @breadoven in https://github.com/iNavFlight/inav/pull/9261
- Add blackbox target heading + missing Nav auto enabled flight modes by @breadoven in https://github.com/iNavFlight/inav/pull/9249
- SKYSTARSH743HD remove non-existent S9 & S10. Add servos target by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9214
- [doc] update serial_printf document iaw current implementation by @stronnag in https://github.com/iNavFlight/inav/pull/9266
- Change motor/servo assignements for RUSH_BLADE_F7 targets by @mmosca in https://github.com/iNavFlight/inav/pull/9262
- Pitot DLVR-L10D sensor by @jmajew in https://github.com/iNavFlight/inav/pull/9216
- Add GEPRCF405 and GEPRCF722 targets by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/9260
- Multi function OSD utility by @breadoven in https://github.com/iNavFlight/inav/pull/8698
- Timer DMA burst by @shirase in https://github.com/iNavFlight/inav/pull/9265
- Add mup6500 for mambaf405us by @jianwwpro in https://github.com/iNavFlight/inav/pull/8827
- Programming Frameword.md: Update to match Configurator renaming by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9275
- SpeedyBee F7 Mini V2 target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9272
- Speedybee F405 mini by @DzikuVx in https://github.com/iNavFlight/inav/pull/9273
- Multirotor course hold/cruise mode by @breadoven in https://github.com/iNavFlight/inav/pull/9213
- Bump navConfig PG that was forgotten in #9220 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9278
- Switch MatekF405TE to use burst DMA by @DzikuVx in https://github.com/iNavFlight/inav/pull/9277
- Update Building in Windows 10 or 11 with Linux Subsystem.md by @wchnflr in https://github.com/iNavFlight/inav/pull/9279
- BETAFPVF435 unofficial target by @mmosca in https://github.com/iNavFlight/inav/pull/9281
- Make PWM allocation a bit smarter. by @mmosca in https://github.com/iNavFlight/inav/pull/9268
- [sitl] add --version, add git commit to version output by @stronnag in https://github.com/iNavFlight/inav/pull/9286
- docs/programming user21 typo by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9289
- Failsafe fixes by @breadoven in https://github.com/iNavFlight/inav/pull/9283
- Mixer throttle fixes/improvements + more OSD Throttle changes by @breadoven in https://github.com/iNavFlight/inav/pull/9274
- Ignore tasks.json and use tabs in C files by @MrD-RC in https://github.com/iNavFlight/inav/pull/9295
- Enable the virtual pitot by default by @MrD-RC in https://github.com/iNavFlight/inav/pull/9299
- Add DPS310 by @dlt2018 in https://github.com/iNavFlight/inav/pull/9284
- Drop output_mode setting by @DzikuVx in https://github.com/iNavFlight/inav/pull/9300
- Throttle related refactor/clean up by @breadoven in https://github.com/iNavFlight/inav/pull/9287
- docs/ipf: Fix typos and clarify wording by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9298
- Further simplify timer usage flags. by @mmosca in https://github.com/iNavFlight/inav/pull/9288
- Bulk update targets with new pwm output assignments by @mmosca in https://github.com/iNavFlight/inav/pull/9309
- Remove timer compatibility define, since all targets have been updated by @mmosca in https://github.com/iNavFlight/inav/pull/9318
- DSHOT delay fix by @shirase in https://github.com/iNavFlight/inav/pull/9321
- [docs] modernise Serial and RX documents by @stronnag in https://github.com/iNavFlight/inav/pull/9322
- Mixer profile to open the posibility for vtol/mixed platform by @shota3527 in https://github.com/iNavFlight/inav/pull/8555
- Add SouthPAN SBAS for all my friends in AU/NZ. by @mmosca in https://github.com/iNavFlight/inav/pull/9320
- Drop NMEA protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/9302
- SpeedyBee F405 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/9324
- SpeedyBEEF405WING Change S11 timer, since TIM1 is used by LED by @mmosca in https://github.com/iNavFlight/inav/pull/9325
- Remove info about F3 mcus from Temperature sensors documentation by @mmosca in https://github.com/iNavFlight/inav/pull/9337
- Add Rate Dynamics to MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/9336
- Update PR test instructions by @mmosca in https://github.com/iNavFlight/inav/pull/9338
- Flight remaining flight distance value by @MrD-RC in https://github.com/iNavFlight/inav/pull/9333
- Fix mixer config initialization sequence by @shota3527 in https://github.com/iNavFlight/inav/pull/9339
- Fix for Rate dynamics MSP layer by @DzikuVx in https://github.com/iNavFlight/inav/pull/9340
- Add myself to Authors by @mmosca in https://github.com/iNavFlight/inav/pull/9341
- Add odometer to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9335
- Update Controls.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9351
- IPF: Add yaw operand to go with pitch and roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9305
- Add MatekH743HD variant by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9244
- additional fixes for mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9363
- fixed HITL docs by @RomanLut in https://github.com/iNavFlight/inav/pull/9353
- Add the Aocodarcf722aio file by @dlt2018 in https://github.com/iNavFlight/inav/pull/9314
- Lower default hover throttle to 30% by @mmosca in https://github.com/iNavFlight/inav/pull/9361
- Increase channels to 24 for Jeti by @MrD-RC in https://github.com/iNavFlight/inav/pull/9350
- Add pilot logo to OSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/9332
- fixes servo output issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9366
- minor changes on ahrs by @shota3527 in https://github.com/iNavFlight/inav/pull/9360
- Timer N channel fix by @shirase in https://github.com/iNavFlight/inav/pull/9276
- Add ICM42605 driver for SKYSTARSF405HD by @DusKing1 in https://github.com/iNavFlight/inav/pull/9370
- Multirotor coursehold/cruise mode fix by @breadoven in https://github.com/iNavFlight/inav/pull/9380
- Ez Tune for Multirotors by @DzikuVx in https://github.com/iNavFlight/inav/pull/9354
- update docker build scripts by @RomanLut in https://github.com/iNavFlight/inav/pull/9346
- Add SYM_TOTAL and SYM_GFORCE to BFCOMPAT by @mmosca in https://github.com/iNavFlight/inav/pull/9385
- In flight emergency rearm by @breadoven in https://github.com/iNavFlight/inav/pull/9254
- Re-enable baro. max chip seems to cause issues by @mmosca in https://github.com/iNavFlight/inav/pull/9400
- Make it easier to include all baro drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9394
- Make it easier to include all compass drivers to target by @mmosca in https://github.com/iNavFlight/inav/pull/9401
- BFCOMPAT - improve wind and airspeed fields and labels by @rmaia3d in https://github.com/iNavFlight/inav/pull/9388
- HITL/SITL: allow hitl/sitl to arm with uncalibrated accelerometer by @RomanLut in https://github.com/iNavFlight/inav/pull/9345
- fix mixer_profie configurator issue by @shota3527 in https://github.com/iNavFlight/inav/pull/9364
- flight/pid.c: fix AngleOverride(yaw) to degrees by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9329
- HITL: simulate battery voltage with any sensor by @RomanLut in https://github.com/iNavFlight/inav/pull/9212
- HITL: hd osd support by @RomanLut in https://github.com/iNavFlight/inav/pull/9327
- Fixed #9399 can't find baro chip on PB6/PB7 I2C1 by @lida2003 in https://github.com/iNavFlight/inav/pull/9412
- Fix JETI EXBUS overflow by @DzikuVx in https://github.com/iNavFlight/inav/pull/9407
- Disable ASFR function on ICM426xx driver by @DzikuVx in https://github.com/iNavFlight/inav/pull/9409
- 16G scale range for bmi270 accelerometer by @shota3527 in https://github.com/iNavFlight/inav/pull/9410
- tpa on yaw and i-term limit by @shota3527 in https://github.com/iNavFlight/inav/pull/9408
- FW Auto level trim bug fix by @breadoven in https://github.com/iNavFlight/inav/pull/9393
- Enhance mAh remaining OSD element by @MrD-RC in https://github.com/iNavFlight/inav/pull/9334
- Allow f722 to use mixer profile by @shota3527 in https://github.com/iNavFlight/inav/pull/9416
- Correct disarm servo throttle by @DzikuVx in https://github.com/iNavFlight/inav/pull/9413
- SAFETY issue -- servos.c: Correct servo throttle off when disarmed (not full throttle at disarm) by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9330
- OSD Joystick by @RomanLut in https://github.com/iNavFlight/inav/pull/9201
- New target: ATOMRC Exceed F405 FC V2 by @NickB1 in https://github.com/iNavFlight/inav/pull/8956
- Add more power options for 1G3 group by @MATEKSYS in https://github.com/iNavFlight/inav/pull/9243
- New target: SDMODELH7V1 by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9114
- Framework.md - Note about common error by @sensei-hacker in https://github.com/iNavFlight/inav/pull/9422
- Update OSD.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/9425
- comment on how to clone specific INAV releases added by @Daniel-1276 in https://github.com/iNavFlight/inav/pull/9414
- update vtol documents by @shota3527 in https://github.com/iNavFlight/inav/pull/9426
- Put getConfigMixerProfile as the last byte in message by @DzikuVx in https://github.com/iNavFlight/inav/pull/9431
New Contributors
- @HKR1987 made their first contribution in https://github.com/iNavFlight/inav/pull/8902
- @VasilKalchev made their first contribution in https://github.com/iNavFlight/inav/pull/8927
- @ryet9 made their first contribution in https://github.com/iNavFlight/inav/pull/9001
- @shirase made their first contribution in https://github.com/iNavFlight/inav/pull/9028
- @pgp69 made their first contribution in https://github.com/iNavFlight/inav/pull/9037
- @lida2003 made their first contribution in https://github.com/iNavFlight/inav/pull/9143
- @druckgott made their first contribution in https://github.com/iNavFlight/inav/pull/9221
- @psmitty7373 made their first contribution in https://github.com/iNavFlight/inav/pull/9235
- @jianwwpro made their first contribution in https://github.com/iNavFlight/inav/pull/8827
- @wchnflr made their first contribution in https://github.com/iNavFlight/inav/pull/9279
- @NickB1 made their first contribution in https://github.com/iNavFlight/inav/pull/8956
- @Daniel-1276 made their first contribution in https://github.com/iNavFlight/inav/pull/9414
Full Changelog: https://github.com/iNavFlight/inav/compare/6.1.1...7.0.0-RC1
6.1.1
11 months ago
Hello and welcome to INAV 6.1.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
"Dolphining" bug fix
This release fixes a "dolphining" bug that was affecting fixed wing airplanes in autonomous modes and causing airplanes not being able to precisely control altitude. INAV 6.1.1 addresses this issue and solved the problem.
New targets
- FLYWOOF405PRO
Changelist
What's Changed
- FLYWOOF405PRO target by @DzikuVx in https://github.com/iNavFlight/inav/pull/9115
- Proposed fix for "dolphining" bug in 6.1 by @M0j0Risin in https://github.com/iNavFlight/inav/pull/9111
Full Changelog: https://github.com/iNavFlight/inav/compare/6.1.0...6.1.1
6.1.0
1 year ago
Hello and welcome to INAV 6.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Important Notes
- The STM32 F3 code was removed from repository, it's no longer possible to compile F3 locally
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
H7 stability
INAV 6.1 fixes a bug that was causing the H7 MCU to stop receiving RX signal after EEPROM save operation was performed. This happened from CMS and from Configurator. INAV 6.1 fixes the issue and RX operation is no longer stopped after the save operation
Betaflight HD OSD compatibility mode
INAV 6.1 adds the BFHDCOMPAT OSD mode that is compatible with the Betaflight HD OSD layout.
New targets
- HAKRCF722V2
- HAKRCF405V2
- SKYSTARSF722MINIHD
- SkyStars AT32
- SkyStars H743
CLI
Changed Items
| Name | Item |
|---|---|
| acc_hardware | New: LSM6DXX |
| current_sensor | New: FAKE |
| gps_provider | New: FAKE |
| nav_extra_arming_safety | Default: ALLOW_BYPASS |
| osd_video_system | New: BFHDCOMPAT |
| rangefinder_hardware | New: FAKE |
| receiver_type | New: SIM (SITL) |
| serial_rx | New: FBUS |
| voltage_sensor | New: FAKE |
Changelist
What's Changed
- OSD battery status cleanup by @breadoven in https://github.com/iNavFlight/inav/pull/8780
- Use MC "slow down for turning" option for RTH trackback by @breadoven in https://github.com/iNavFlight/inav/pull/8867
- Fix compilation if OSD is disabled by @DzikuVx in https://github.com/iNavFlight/inav/pull/8860
- Pitot values should only be used if pitot sensor is healthy by @RomanLut in https://github.com/iNavFlight/inav/pull/8857
- show !X on OSD on pitot failure by @RomanLut in https://github.com/iNavFlight/inav/pull/8856
- Add ICM42688 and BMI270 to Betafpv F722 #8841 by @mmosca in https://github.com/iNavFlight/inav/pull/8842
- Enable Auto RC Smoothing by default by @DzikuVx in https://github.com/iNavFlight/inav/pull/8908
- Rangefinder OSD Element Bugfix by @Scavanger in https://github.com/iNavFlight/inav/pull/8853
- Update Windows 11 - VS Code - WSL2 - Hardware Debugging.md by @whsMCU in https://github.com/iNavFlight/inav/pull/8818
- Add support for AT32 chips by @DusKing1 in https://github.com/iNavFlight/inav/pull/8752
- Show loiter instead of poshold in OSD for fixed wing by @MrD-RC in https://github.com/iNavFlight/inav/pull/8892
- SITL (x86) Target by @Scavanger in https://github.com/iNavFlight/inav/pull/8731
- 6.1.0 sitl interop by @stronnag in https://github.com/iNavFlight/inav/pull/8913
- Pull all servos to min when disarmed if thr is mixed in by @DzikuVx in https://github.com/iNavFlight/inav/pull/8916
- Set ALLOW_BYPASS as default nav_extra_arming_safety by @DzikuVx in https://github.com/iNavFlight/inav/pull/8909
- BFCOMPAT mods to increase precision in value scalings by @rmaia3d in https://github.com/iNavFlight/inav/pull/8866
- [SITL] parameterise and reduce TASK_SERIAL rate by @stronnag in https://github.com/iNavFlight/inav/pull/8921
- Add Betaflight "HD" compatibility by @mmosca in https://github.com/iNavFlight/inav/pull/8707
- Improvements to BFCOMPAT character and icon mappings by @rmaia3d in https://github.com/iNavFlight/inav/pull/8926
- Revert "Improvements to BFCOMPAT character and icon mappings" by @mmosca in https://github.com/iNavFlight/inav/pull/8928
- [SITL] Enable telemetry: LTM and MAVLink by @stronnag in https://github.com/iNavFlight/inav/pull/8940
- Fix RX susped on EEPROM operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/8907
- Navigation altitude and position controller reset improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8896
- [SITL Doc] fix typo, clarifications by @stronnag in https://github.com/iNavFlight/inav/pull/8952
- Revert "Switch H7 to -Ofast optimizations" by @DzikuVx in https://github.com/iNavFlight/inav/pull/8948
- Set F7 GCC optimizations to -O2 for F745 and -Os for F277 Always by @DzikuVx in https://github.com/iNavFlight/inav/pull/8953
- Dzikuvx skystars h743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8954
- Remove custom compiler optimizations by @DzikuVx in https://github.com/iNavFlight/inav/pull/8958
- Fix LED Indicators mode for Fixed Wing and Rover by @MrD-RC in https://github.com/iNavFlight/inav/pull/8826
- OSD single page stats by @M0j0Risin in https://github.com/iNavFlight/inav/pull/8755
- Add HAKRCF722V2 target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8970
- Add HAKRCF405V2 target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8969
- [SITL] remove unused / unneeded variables by @stronnag in https://github.com/iNavFlight/inav/pull/8982
- Add target SKYSTARSF722MINIHD by @shellixyz in https://github.com/iNavFlight/inav/pull/8794
- Add support for FBUS by @MrD-RC in https://github.com/iNavFlight/inav/pull/8712
- Improvements to BARO_MSP by @ricardodeazambuja in https://github.com/iNavFlight/inav/pull/8534
- [SITL] sitl specific cmake cleanup (Windows only linker option) by @stronnag in https://github.com/iNavFlight/inav/pull/8995
- Update OSD throttle options by @MrD-RC in https://github.com/iNavFlight/inav/pull/8806
- [SITL] Fix disconnect issue under cygwin by @Scavanger in https://github.com/iNavFlight/inav/pull/9000
- Fix issue with DJI O3 showing miles instead of kFt by @MrD-RC in https://github.com/iNavFlight/inav/pull/9007
- Betaflight configuration AH_DECORATION improvements by @mmosca in https://github.com/iNavFlight/inav/pull/9010
- add dps310 driver for SAGEATF4 target by @shanggl in https://github.com/iNavFlight/inav/pull/9011
- Fix SITL compilation on macosx by @mmosca in https://github.com/iNavFlight/inav/pull/9012
- [SITL] 'fix off-by-one' test for max serial port by @stronnag in https://github.com/iNavFlight/inav/pull/9029
- Fix mspSerialTxBytesFree() in msp_serial.c by @Scavanger in https://github.com/iNavFlight/inav/pull/9022
- fix gpio mux to fix neutronrcf435mini fc blackbox missing bug. by @shanggl in https://github.com/iNavFlight/inav/pull/9014
- [SITL] fix race condition in serial_tcp.c by @stronnag in https://github.com/iNavFlight/inav/pull/9043
- Update HAKRCF405V2 DMA definitions by @nmaggioni in https://github.com/iNavFlight/inav/pull/9030
- Update HAKRCF722V2 DMA definitions by @nmaggioni in https://github.com/iNavFlight/inav/pull/9031
New Contributors
- @whsMCU made their first contribution in https://github.com/iNavFlight/inav/pull/8818
- @DusKing1 made their first contribution in https://github.com/iNavFlight/inav/pull/8752
- @rmaia3d made their first contribution in https://github.com/iNavFlight/inav/pull/8866
- @M0j0Risin made their first contribution in https://github.com/iNavFlight/inav/pull/8755
- @shanggl made their first contribution in https://github.com/iNavFlight/inav/pull/9011
Full Changelog: https://github.com/iNavFlight/inav/compare/6.0.0...6.1.0
6.1.0-RC1
1 year ago
Hello and welcome to INAV 6.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Important Notes
- The STM32 F3 code was removed from repository, it's no longer possible to compile F3 locally
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
H7 stability
INAV 6.1 fixes a bug that was causing the H7 MCU to stop receiving RX signal after EEPROM save operation was performed. This happened from CMS and from Configurator. INAV 6.1 fixes the issue and RX operation is no longer stopped after the save operation
Betaflight HD OSD compatibility mode
INAV 6.1 adds the BFHDCOMPAT OSD mode that is compatible with the Betaflight HD OSD layout.
New targets
- HAKRCF722V2
- HAKRCF405V2
- SKYSTARSF722MINIHD
- SkyStars AT32
- SkyStars H743
CLI
Changed Items
| Name | Item |
|---|---|
| acc_hardware | New: LSM6DXX |
| current_sensor | New: FAKE |
| gps_provider | New: FAKE |
| nav_extra_arming_safety | Default: ALLOW_BYPASS |
| osd_video_system | New: BFHDCOMPAT |
| rangefinder_hardware | New: FAKE |
| receiver_type | New: SIM (SITL) |
| serial_rx | New: FBUS |
| voltage_sensor | New: FAKE |
Changelist
What's Changed
- OSD battery status cleanup by @breadoven in https://github.com/iNavFlight/inav/pull/8780
- Use MC "slow down for turning" option for RTH trackback by @breadoven in https://github.com/iNavFlight/inav/pull/8867
- Fix compilation if OSD is disabled by @DzikuVx in https://github.com/iNavFlight/inav/pull/8860
- Pitot values should only be used if pitot sensor is healthy by @RomanLut in https://github.com/iNavFlight/inav/pull/8857
- show !X on OSD on pitot failure by @RomanLut in https://github.com/iNavFlight/inav/pull/8856
- Add ICM42688 and BMI270 to Betafpv F722 #8841 by @mmosca in https://github.com/iNavFlight/inav/pull/8842
- Enable Auto RC Smoothing by default by @DzikuVx in https://github.com/iNavFlight/inav/pull/8908
- Rangefinder OSD Element Bugfix by @Scavanger in https://github.com/iNavFlight/inav/pull/8853
- Update Windows 11 - VS Code - WSL2 - Hardware Debugging.md by @whsMCU in https://github.com/iNavFlight/inav/pull/8818
- Add support for AT32 chips by @DusKing1 in https://github.com/iNavFlight/inav/pull/8752
- Show loiter instead of poshold in OSD for fixed wing by @MrD-RC in https://github.com/iNavFlight/inav/pull/8892
- SITL (x86) Target by @Scavanger in https://github.com/iNavFlight/inav/pull/8731
- 6.1.0 sitl interop by @stronnag in https://github.com/iNavFlight/inav/pull/8913
- Pull all servos to min when disarmed if thr is mixed in by @DzikuVx in https://github.com/iNavFlight/inav/pull/8916
- Set ALLOW_BYPASS as default nav_extra_arming_safety by @DzikuVx in https://github.com/iNavFlight/inav/pull/8909
- BFCOMPAT mods to increase precision in value scalings by @rmaia3d in https://github.com/iNavFlight/inav/pull/8866
- [SITL] parameterise and reduce TASK_SERIAL rate by @stronnag in https://github.com/iNavFlight/inav/pull/8921
- Add Betaflight "HD" compatibility by @mmosca in https://github.com/iNavFlight/inav/pull/8707
- Improvements to BFCOMPAT character and icon mappings by @rmaia3d in https://github.com/iNavFlight/inav/pull/8926
- Revert "Improvements to BFCOMPAT character and icon mappings" by @mmosca in https://github.com/iNavFlight/inav/pull/8928
- [SITL] Enable telemetry: LTM and MAVLink by @stronnag in https://github.com/iNavFlight/inav/pull/8940
- Fix RX susped on EEPROM operations by @DzikuVx in https://github.com/iNavFlight/inav/pull/8907
- Navigation altitude and position controller reset improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8896
- [SITL Doc] fix typo, clarifications by @stronnag in https://github.com/iNavFlight/inav/pull/8952
- Revert "Switch H7 to -Ofast optimizations" by @DzikuVx in https://github.com/iNavFlight/inav/pull/8948
- Set F7 GCC optimizations to -O2 for F745 and -Os for F277 Always by @DzikuVx in https://github.com/iNavFlight/inav/pull/8953
- Dzikuvx skystars h743 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8954
- Remove custom compiler optimizations by @DzikuVx in https://github.com/iNavFlight/inav/pull/8958
- Fix LED Indicators mode for Fixed Wing and Rover by @MrD-RC in https://github.com/iNavFlight/inav/pull/8826
- OSD single page stats by @M0j0Risin in https://github.com/iNavFlight/inav/pull/8755
- Add HAKRCF722V2 target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8970
- Add HAKRCF405V2 target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8969
- [SITL] remove unused / unneeded variables by @stronnag in https://github.com/iNavFlight/inav/pull/8982
- Add target SKYSTARSF722MINIHD by @shellixyz in https://github.com/iNavFlight/inav/pull/8794
- Add support for FBUS by @MrD-RC in https://github.com/iNavFlight/inav/pull/8712
- Improvements to BARO_MSP by @ricardodeazambuja in https://github.com/iNavFlight/inav/pull/8534
- [SITL] sitl specific cmake cleanup (Windows only linker option) by @stronnag in https://github.com/iNavFlight/inav/pull/8995
- Update OSD throttle options by @MrD-RC in https://github.com/iNavFlight/inav/pull/8806
New Contributors
- @whsMCU made their first contribution in https://github.com/iNavFlight/inav/pull/8818
- @DusKing1 made their first contribution in https://github.com/iNavFlight/inav/pull/8752
- @rmaia3d made their first contribution in https://github.com/iNavFlight/inav/pull/8866
- @M0j0Risin made their first contribution in https://github.com/iNavFlight/inav/pull/8755
Full Changelog: https://github.com/iNavFlight/inav/compare/6.0.0...6.1.0-RC1
6.0.0
1 year ago
Hello and welcome to INAV 6 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Important Notes
- The STM32 F3 code was removed from repository, it's no longer possible to compile F3 locally
Upgrading from a previous release
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
New AHRS (Attitude & Heading Reference System)
INAV 6.0 includes a complete rework of the AHRS for Attitude Estimation, to make sure INAV always knows its correct attitude relative to the ground. This should once and for all fix the issue, known as "Horizon Drift" and makes any navigation mode as well as self-levelling modes like ANGLE fully reliable and allows much more precise GPS-Navigation. This affects Fixed Wing as well as Multirotor.
The best results are given if the craft is equipped with GPS and in the case of Multirotor also with a compass. But also for pure LOS Craft that have no GPS on board, the AHI stability is noticeably improved in most situations. To work best with non-GPS Fixed Wings, the Reference Airspeed has to be set according the average cruise speed of the craft.
When Updating from INAV 5.1 or older
If you load a diff file from INAV 5.1 or older, it is safe to ignore errors related to imu_acc_ignore_rate, imu_acc_ignore_slope, imu_dcm_kp, imu_dcm_kp_map, or imu_dcm_ki_mag. These variables behave differently in 6.0 and have been renamed. You should use the default values of the new parameter first. Below are the new parameter defaults.
set ahrs_acc_ignore_rate = 15
set ahrs_acc_ignore_slope = 5
set ahrs_dcm_kp = 2000
set ahrs_dcm_ki = 50
set ahrs_dcm_kp_mag = 2000
set ahrs_dcm_ki_mag = 50
ahrs_inertia_comp_method
If you have used the Feature Preview release, your diff, you may have the parameter imu_inertia_comp_method. If not and you are coming from INAV 5.0 or 5.1, you may need to add the new parameter shown below. Firstly, if you have imu_inertia_comp_method in your diff, you can remove that line.
If you are using fixed wing, you should add this new parameter to the # master section of your diff:
set ahrs_inertia_comp_method = ADAPTIVE
For all other platforms, you do not need to add anything. The default value of VELNED is correct for non-fixed wing platforms.
For Fixed Wing Craft with no GPS: set fw_reference_airspeed = (set this in cm/s. Set this to airspeed at which PIDs were tuned. Usually should be set to cruise airspeed. Also used for coordinated turn calculation if airspeed sensor is not present.)
HUD Offset change
The operation of osd_horizon_offset has been reversed, to make it more intuitive. If you have a non-zero value for osd_horizon_offset it will need to be inverted. For example, osd_horizon_offset = 1 would become osd_horizon_offset = -1. Positive values move the HUD up, and negative values move it down. This is corrected with the CLI Update tool.
RTH Trackback
When triggered the craft returns along the trackback route until the end is reached at which point it reverts to normal RTH heading directly home. It doesn't perform the RTH climb phase but instead uses the track point altitude but with altitude never allowed below the altitude of the start point so it can climb but never descend below the start point.
OFF by default, adjust nav_rth_trackback_mode to enable. For details see #7988
Accelerometer calibration is optional
Accelerometer calibration is required only if any of the Accelerometer Based Flight Modes or Failsafe procedures is configured. For example, ACC calibration will be needed when Failsafe RTH is enabled, or any GPS assisted flight modes is configured. Acro only multirotor and fixed wings do not require calibration.
nav_extra_arming_safety OFF option
The off option has been removed from nav_extra_arming_safety. Instead, the allow_bypass can be used for with the same effect. To allow the bypass, yaw right and arm. The extra arming safety features will be disabled until the next power cycle of the battery. Please update your diff if you use this parameter; either manually, or using this tool.
Improved fixed wing waypoint course tracking
Attempts to improve fixed wing WP course tracking accuracy by adding a couple of options:
-
Tracking accuracy option that forces craft toward the waypoint course line as quickly as possible and actively tracks the line thereafter. A single setting adjusts the strength of the tracking behaviour. Works for WP mode and RTH trackback. Option is disabled by default.
-
Turn smoothing option for waypoint turns. Sets a loiter point within the turn such that the craft follows a loiter turn path that either passes through the waypoint or cuts the turn missing the waypoint (2 settings possible). Only works for WP mode. Option is disabled by default.
See #8234 for details
Support for Hardware In The Loop simulator in X-Plane 11
INAV flight controller can be used with X-Plane 11 flight simulator. Very useful for training, testing and debugging. Requires X-Plane 11 and HITL Plugin https://github.com/RomanLut/INAV-X-Plane-HITL
Waypoint multi-mission in flight mission change
Allows WP multi-missions to be changed in flight using new mission change mode. With mode active the required mission index can be selected by cycling through missions using the WP mode switch. Selected mission is loaded when mission change mode is switched off. Mission index can also be changed through addition of a new Mission Index adjustment function which should be useful for DJI users unable to use the normal OSD mission related fields. See #8354 for details
MSP DisplayPort fixes and updates
INAV has now support for various flavours of the MSP DisplayPort protocol used by HDZero, DJI Goggles 2, Walksnail Avatar or WTFOS. Based on the osd_video_system setting different canvas sizes and glyphs are used. Available options are:
-
AUTO- for analogue systems only -
PAL -
NTSC -
HDZERO -
DJIWTF -
AVATAR -
BF43COMPAT- keep the compatibility with Betaflight 4.3 implementation by lowering canvas size, lowering the number of OSD glyphs and matching to Betaflight character mapping. Required for DJI MSP DisplayPort with DJI O3 Air Unit
Enhance programming options for waypoint missions
NOTE: Please read this section if you are using the Programming Framework (Programming tab).
The programming framework surrounding waypoints has changed. This has caused a conflict in compatibility with previous versions of INAV. If you use anything in the programming tab. Please run your diff through this conversion tool, to keep your logic conditions working. Please feel free to check out the new waypoint related logical switch operands in the Programming Framework document.
Increase nav_wp_safe_distance maximum
nav_wp_safe_distance has been replaced with nav_wp_max_safe_distance. This setting uses metres, and used to define the maximum distance away that the first waypoint can be. Please update your diff if you use this parameter; either manually, or using this tool.
Stop allowing navigation modes to be active while arming
The ability to arm the craft while in a navigation mode has been removed. The only people who this will effect are those who use permanently enabled autolaunch. Pre-6.0 you could arm while in a navigation mode. However this is dangerous, as it is easy to not realise, arm, disable the launch, then have the motor go to the cruise throttle. You will still be able to use a navigation mode as the exit mode from a launch. You just need to use the correct procedure for initiating the launch:
- Be in a non-navigation mode
- Arm
- Select the flight mode that you want to use on launch exit
- Raise the throttle to the level you want on launch exit
- The motor will enter idle if idle throttle is used, or await being thrown
- Throw the plane in to the air, and autolaunch will trigger
Disarm on land by default
The disarm on landing flag is now set to ON by default. This means, after successful automated landing your aircraft should disarm and stop the motors automatically!
Automated landing manual activation
Allows an emergency landing to be triggered manually as required. Landing started or ended by rapid toggling of PosHold mode, at least 5 times at a minimum rate of 1Hz. Emergency landing position hold added which will work for all emergency landings regardless of cause so long as a valid position is available. Failsafe inhibited during manual emergency landing to allow landing to continue if Failsafe triggered whilst active.
Other changes
- Gyro noise peaks are now logged into blackbox as separate fields, not debug options. Setting documentation
- Raw gyro signal is now logged into blackbox as separate field, not debug options. Setting documentation
- Adds auto smoothing of RC input based on RX refresh rate. Disabled by default, can be enabled with
SET rc_filter_auto=ON - Wind Estimator is now giving proper results
- 3D Matrix filter improves PID tuning on noisy Multirotors. See #8253
- Strobe lights support. See #8536
- Kakute H7 V2 Invert PINIO2 so VTX is ON by default See #8628
Other removed functions
- MTK GPS protocol support
- NAZA GPS protocol support
- BNO055 Secondary IMU function
- MPU6050 gyro support
- SPI RX protocol support
- JR XBUS RX protocol support
- SUMH RX protocol support
New targets
- Foxeer F722 V4
- Foxeer F745 AIO V3
- Kakute H7 V2
- SpeedyBee F745 AIO
- Zeez F7 V3
- Diatone Mamba F722 WING
- AocodaRC F4 V2
- HakRC F722D
- HakRC F411 AIO
- HakRC F405 DJI
- GEPRC F722 AIO
- SpeedyBee F405 WING
CLI
Changed settings
Note: nav_extra_arming_safety The OFF option has been removed. ON and ALLOW_BYPASS are now the only valid options. ALLOW_BYPASS permits arming in "navigation unsafe" condition by temporally applying full right yaw when operating the arm switch.
| Name | Values |
|---|---|
| acc_hardware | Removed: MPU6050 |
| debug_modes | New: POS_EST, Removed: GYRO, SBUS, FPORT, ERPM, RPM_FILTER, RPM_FREQ, DYNAMIC_FILTER, DYNAMIC_FILTER_FREQUENCY, IRLOCK, KALMAN_GAIN, PID_MEASUREMENT, SPM_CELLS, SPM_VS600, SPM_VARIO, IMU2, SMITH_PREDICTOR |
| gps_provider | Removed: UNUSED, NAZA, MTK |
| mag_hardware | Removed: GPSMAG |
| nav_extra_arming_safety | Removed: OFF |
| osd_video_system | New: HDZERO, DJIWTF, AVATAR, BF43COMPAT |
| receiver_type | Removed: SPI |
| serial_rx | Removed: SUMH, XB-B, XB-B-RJ01 |
New Items
| Name | Description |
|---|---|
| dynamic_gyro_notch_3d_q | Q factor for 3D dynamic notches Values: 1 - 1000 Default: 200 |
| dynamic_gyro_notch_mode | Gyro dynamic notch type Default: 2D |
| failsafe_mission_delay | Applies if failsafe occurs when a WP mission is in progress. Sets the time delay in seconds between failsafe occurring and the selected failsafe procedure activating. If set to -1 the failsafe procedure won't activate at all and the mission will continue until the end. Values: -1 - 600 Default: 0 |
| imu_gps_yaw_windcomp | Wind compensation in heading estimation from gps groundcourse(fixed wing only) Default: TRUE |
| imu_inertia_comp_method | Inertia force compensation method when gps is avaliable, VELNED use the accleration from gps, TURNRATE calculates accleration by turnrate multiplied by speed, ADAPTIVE choose best result from two in each ahrs loop Default: VELNED |
| nav_auto_disarm_delay | Delay before craft disarms when nav_disarm_on_landing is set (ms) Values: 100 - 10000 Default: 1000 |
| nav_fw_launch_abort_deadband | Launch abort stick deadband in [r/c points], applied after r/c deadband and expo. The Roll/Pitch stick needs to be deflected beyond this deadband to abort the launch. Values: 2 - 250 Default: 100 |
| nav_fw_launch_manual_throttle | Allows launch with manually controlled throttle. INAV only levels wings and controls climb pitch during launch. Throttle is controlled directly by throttle stick movement. IF USED WITHOUT A GPS LOCK plane must be launched immediately after throttle is increased to avoid issues with climb out stabilisation and the launch ending sooner than expected (launch end timer starts as soon as the throttle stick is raised). Default: FALSE |
| nav_fw_wp_tracking_accuracy | Waypoint tracking accuracy forces the craft to quickly head toward and track along the waypoint course line as closely as possible. Settings 1 to 10 adjust the course tracking response. Higher values dampen the response reducing possible overshoot. A value of 5 is a good starting point. Set to 0 to disable. Values: 0 - 10 Default: 0 |
| nav_fw_wp_tracking_max_angle | Sets the maximum allowed alignment convergence angle to the waypoint course line when nav_fw_wp_tracking_accuracy is active [degrees]. Lower values result in smoother alignment with the course line but will take more distance until this is achieved. Values: 30 - 80 Default: 60 |
| nav_fw_wp_turn_smoothing | Smooths turns during WP missions by switching to a loiter turn at waypoints. When set to ON the craft will reach the waypoint during the turn. When set to ON-CUT the craft will turn inside the waypoint without actually reaching it (cuts the corner). Default: OFF |
| nav_land_detect_sensitivity | Changes sensitivity of landing detection. Higher values increase speed of detection but also increase risk of false detection. Default value should work in most cases. Values: 1 - 15 Default: 5 |
| nav_rth_trackback_distance | Maximum distance allowed for RTH trackback. Normal RTH is executed once this distance is exceeded [m]. Values: 50 - 2000 Default: 500 |
| nav_rth_trackback_mode | Useage modes for RTH Trackback. OFF = disabled, ON = Normal and Failsafe RTH, FS = Failsafe RTH only. Default: OFF |
| nav_wp_max_safe_distance | First waypoint in the mission should be closer than this value [m]. A value of 0 disables this check. Values: 0 - 1500 Default: 100 |
| osd_ahi_pitch_interval | Draws AHI at increments of the set pitch interval over the full pitch range. AHI line is drawn with ends offset when pitch first exceeds interval with offset increasing with increasing pitch. Offset direction changes between climb and dive. Set to 0 to disable (Not for pixel OSD) Values: 0 - 30 Default: 0 |
| osd_msp_displayport_fullframe_interval | Full Frame redraw interval for MSP DisplayPort [deciseconds]. This is how often a full frame update is sent to the DisplayPort, to cut down on OSD artifacting. The default value should be fine for most pilots. Though long range pilots may benefit from increasing the refresh time, especially near the edge of range. -1 = disabled (legacy mode) , 0 = every frame (not recommended) , default = 10 (1 second) Values: -1 - 600 Default: 10 |
| pilot_name | Pilot name Default: |
| rc_filter_auto | When enabled, INAV will set RC filtering based on refresh rate and smoothing factor. Default: FALSE |
| rc_filter_lpf_hz | RC data biquad filter cutoff frequency. Lower cutoff frequencies result in smoother response at expense of command control delay. Practical values are 20-50. Set to zero to disable entirely and use unsmoothed RC stick values Values: 15 - 250 Default: 50 |
| rc_filter_smoothing_factor | The RC filter smoothing factor. The higher the value, the more smoothing but also the more delay in response. Value 1 sets the filter at half the refresh rate. Value 100 sets the filter to aprox. 10% of the RC refresh rate Values: 1 - 100 Default: 30 |
Removed Items
| Name | Description |
|---|---|
| baro_median_filter | |
| eleres_freq | |
| eleres_loc_delay | |
| eleres_loc_en | |
| eleres_loc_power | |
| eleres_signature | |
| eleres_telemetry_en | |
| eleres_telemetry_power | |
| failsafe_mission | see new failsafe_mission_delay |
| imu2_align_pitch | |
| imu2_align_roll | |
| imu2_align_yaw | |
| imu2_gain_acc_x | |
| imu2_gain_acc_y | |
| imu2_gain_acc_z | |
| imu2_gain_mag_x | |
| imu2_gain_mag_y | |
| imu2_gain_mag_z | |
| imu2_hardware | |
| imu2_radius_acc | |
| imu2_radius_mag | |
| imu2_use_for_osd_ahi | |
| imu2_use_for_osd_heading | |
| imu2_use_for_stabilized | |
| nav_fw_auto_disarm_delay | See generic nav_auto_disarm_delay |
| nav_mc_auto_disarm_delay | See generic nav_auto_disarm_delay |
| nav_wp_safe_distance | see nav_wp_max_safe_distance |
| rc_filter_frequency | |
| rx_spi_id | |
| rx_spi_protocol | |
| rx_spi_rf_channel_count |
Changelist
The full list of changes is available here The full list of INAV Configurator changes is available here
What's Changed from INAV 5.1
- Update VTx.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/8825
- not even INAV should dereference NULL pointers by @stronnag in https://github.com/iNavFlight/inav/pull/8862
- Disable stick commands when CMS is active by @breadoven in https://github.com/iNavFlight/inav/pull/8870
- Add GEPRC new target "GEPRC_F722_AIO" by @YI-BOYANG in https://github.com/iNavFlight/inav/pull/8570
- [tools] add script to generate Release Notes CLI new/changed/removed settings sections by @stronnag in https://github.com/iNavFlight/inav/pull/8784
- Update Programming Framework.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/8797
- CMS Save and Reboot eeprom save fix by @breadoven in https://github.com/iNavFlight/inav/pull/8793
- Make CLI string input uppercase by @MrD-RC in https://github.com/iNavFlight/inav/pull/8804
- docs/Programming framework: Fix typo, add examples by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8805
- Update Temperature sensors.md by @WizzX-FPV in https://github.com/iNavFlight/inav/pull/8811
- Multirotor Failsafe landing detection false trigger fix by @breadoven in https://github.com/iNavFlight/inav/pull/8813
- add icm42688p support in MATEKF405SE target by @MATEKSYS in https://github.com/iNavFlight/inav/pull/8812
- Continuous Servo Autotrim Fix (Replacement for #8816) by @Scavanger in https://github.com/iNavFlight/inav/pull/8821
- Improved wind estimator - OSD stale reading state by @MrD-RC in https://github.com/iNavFlight/inav/pull/8832
- AXISFLYINGF7PRO target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8831
- Added AUTOLEVEL system message and updated pitch trim on screen by @tiriad in https://github.com/iNavFlight/inav/pull/8815
- Add MSP_BATTERY_STATE for DJI Googles battery display by @mmosca in https://github.com/iNavFlight/inav/pull/8846
- Add a mapping for 3D kph and mph symbols by @DzikuVx in https://github.com/iNavFlight/inav/pull/8761
- Pan Enhancements and cardinal markers for ESP32 Radar by @MrD-RC in https://github.com/iNavFlight/inav/pull/8699
- Fix WS2812 led definition in IFLIGHT_BLITZ_F722 target by @mmosca in https://github.com/iNavFlight/inav/pull/8770
- ahrs parameter names change by @shota3527 in https://github.com/iNavFlight/inav/pull/8767
- Fix formatting of decimal numbers in BF43COMPAT display mode by @mmosca in https://github.com/iNavFlight/inav/pull/8776
- Simplify and fix altitude processing for BF43COMPAT by @DzikuVx in https://github.com/iNavFlight/inav/pull/8779
- Clean old box comments by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8076
- Update Omnibus F4.md by @gigabytebit in https://github.com/iNavFlight/inav/pull/8088
- Remove the rest of the PCA9685 driver by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8085
- Fix mixing motor and servo on same timer. by @sasodoma in https://github.com/iNavFlight/inav/pull/8071
- [fc/fc_msp_box.c] Remove uncompiled line by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8077
- Clear the #if 0 by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8118
- Target release cleanup by @DzikuVx in https://github.com/iNavFlight/inav/pull/8108
- Make use of calc_length_pythagorean_2D on some lines by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8101
- Edit GPS Provider list by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8102
- [flash_m25p16.c] Add W25Q128 variant by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8054
- Drop MTK GPS by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8084
- RTH Trackback by @breadoven in https://github.com/iNavFlight/inav/pull/7988
- Remove nav_extra_arming_safety = OFF option by @MrD-RC in https://github.com/iNavFlight/inav/pull/8106
- Fix PC2/PC3 ADC not working on MAMBAH743 by @hogthrob in https://github.com/iNavFlight/inav/pull/8149
- [BMP280] Allow target-specific I2C address definition by @RomanLut in https://github.com/iNavFlight/inav/pull/8129
- Drop support for NAZA GPS by @DzikuVx in https://github.com/iNavFlight/inav/pull/8144
- Release 5.0.0 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8061
- Fix wrong merge by @DzikuVx in https://github.com/iNavFlight/inav/pull/8151
- INAV 6 version bump by @DzikuVx in https://github.com/iNavFlight/inav/pull/8141
- Set Gyro Raw as an independent Blackbox field, not debug mode by @DzikuVx in https://github.com/iNavFlight/inav/pull/8139
- [cli.c] RC map code aesthetics by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8153
- Remove F3 from the codebase by @DzikuVx in https://github.com/iNavFlight/inav/pull/8053
- Settings.md: Document osd_ahi_reverse_roll by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8167
- Drop a function used only in STM32F3 by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8164
- Drop the BNO055 I2C version by @DzikuVx in https://github.com/iNavFlight/inav/pull/8168
- Drop the JR XBUS support as not used by @DzikuVx in https://github.com/iNavFlight/inav/pull/8176
- Remove an unused definition by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8181
- Reorder box_t to save few hundreds of bytes by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8180
- Drop SPI RX as not used by any supported hardware by @DzikuVx in https://github.com/iNavFlight/inav/pull/8173
- Reset fixed wing heading status on disarm by @breadoven in https://github.com/iNavFlight/inav/pull/8160
- OmnibusF4 RX serial fix by @breadoven in https://github.com/iNavFlight/inav/pull/8175
- Increased FW launch abort pitch/roll stick dead band by @breadoven in https://github.com/iNavFlight/inav/pull/8161
- Remove additional validation for motor rate by @DzikuVx in https://github.com/iNavFlight/inav/pull/8174
- Fix surface mode msp box availability logic by @breadoven in https://github.com/iNavFlight/inav/pull/8171
- Update VTx.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/8187
- Opimise navwaypoint_t stuct alignment by @stronnag in https://github.com/iNavFlight/inav/pull/8182
- Optimize memory for better alignment by @DzikuVx in https://github.com/iNavFlight/inav/pull/8183
- Fix RX Serial Enumeration by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8191
- Remove unused rxRefreshRate by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8189
- Configurator: Reset PIDs button to use applied defaults by @MrD-RC in https://github.com/iNavFlight/inav/pull/8185
- Log gyro noise peaks as separate fields by @DzikuVx in https://github.com/iNavFlight/inav/pull/8197
- Drop SUMH RX protocol by @DzikuVx in https://github.com/iNavFlight/inav/pull/8198
- Update jetiexbus.c by @RoadyFPV in https://github.com/iNavFlight/inav/pull/8202
- Support for Flash Memory W25N01G of 128MB by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8166
- [STM32F3] Remove everything else by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8204
- Debug cleanup by @DzikuVx in https://github.com/iNavFlight/inav/pull/8211
- [Building in Linux.md] Fix Typo by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8222
- Remove unused header file by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8221
- Drop the MPU-6050 Support by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8213
- Remove barometer median filter by @digitalentity in https://github.com/iNavFlight/inav/pull/8201
- OSD PG reset template version bump by @breadoven in https://github.com/iNavFlight/inav/pull/8217
- Nav launch stick abort deadband setting by @breadoven in https://github.com/iNavFlight/inav/pull/8218
- RC interpolation updates by @DzikuVx in https://github.com/iNavFlight/inav/pull/8212
- [config_eeprom.c] Replace a function with another one that already exists in the library by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8215
- Report motor RPM via MSP by @DzikuVx in https://github.com/iNavFlight/inav/pull/8225
- Make HUD offset more intuitive by @MrD-RC in https://github.com/iNavFlight/inav/pull/8226
- Nav launch manual throttle option by @breadoven in https://github.com/iNavFlight/inav/pull/8134
- Remove some NO optimizations made by MCU_FLASH_SIZE by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8230
- fixed wind estimator by @RomanLut in https://github.com/iNavFlight/inav/pull/8228
- fixed wind direction icon on osd by @RomanLut in https://github.com/iNavFlight/inav/pull/8227
- Update Building in Windows 10 or 11 with MSYS2.md by @pwnept in https://github.com/iNavFlight/inav/pull/8248
- Update Matrix Filter to 3D Matrix Filter by @DzikuVx in https://github.com/iNavFlight/inav/pull/8253
- Add glide time, glide distance, and climb efficiency OSD elements by @MrD-RC in https://github.com/iNavFlight/inav/pull/8081
- Update PPM by @MrD-RC in https://github.com/iNavFlight/inav/pull/8269
- Updated profiles.md doc by @MrD-RC in https://github.com/iNavFlight/inav/pull/8279
- Add USER3 mode by @shellixyz in https://github.com/iNavFlight/inav/pull/8276
- Add target: NEUTRONRCH7BT by @shellixyz in https://github.com/iNavFlight/inav/pull/8277
- Enforce waypoint altitude tolerance fix by @breadoven in https://github.com/iNavFlight/inav/pull/8280
- Improved fixed wing waypoint course tracking by @breadoven in https://github.com/iNavFlight/inav/pull/8234
- Allow autolevel in nav_course_hold_mode by @FinalFrag in https://github.com/iNavFlight/inav/pull/8178
- Fix altitude conversion in MSP_SET_RAW_GPS by @stronnag in https://github.com/iNavFlight/inav/pull/8337
- Updated CMS GPSNAV PIDs by @breadoven in https://github.com/iNavFlight/inav/pull/8326
- make use of the MS2S macro whenever possible by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8332
- Support for Hardware In The Loop simulator in X-Plane 11 by @RomanLut in https://github.com/iNavFlight/inav/pull/8268
- fixed BOX_PERMANENT_ID_USER3 collision by @RomanLut in https://github.com/iNavFlight/inav/pull/8346
- Use ARRAYLEN macro where applicable by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8323
- Fix uint8_t to bool by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8325
- Rename pitotCalculateAirSpeed() by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8330
- INAV 5.1.0 Release branch by @DzikuVx in https://github.com/iNavFlight/inav/pull/8186
- Mamba 2022B targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8368
- Fix S1 by removing LED conflict by @DzikuVx in https://github.com/iNavFlight/inav/pull/8371
- [OMNIBUSF4V3] Add BMI270 support by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8351
- [fc_core.c] Rename annexCode void by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8329
- Drop the old HIL by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8281
- Missing Nav default settings fix by @breadoven in https://github.com/iNavFlight/inav/pull/8396
- Treat wp.p3 as bitfield by @stronnag in https://github.com/iNavFlight/inav/pull/8393
- HakRC F405 DJI target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8384
- HakRC F722D target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8387
- Re-order boxmodes to have as little disruption to 5.1 as possible by @MrD-RC in https://github.com/iNavFlight/inav/pull/8394
- added scripts to update Settings.md with Docker by @RomanLut in https://github.com/iNavFlight/inav/pull/8350
- HakRC F411 AIO target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8385
- WP mode failsafe delay setting by @breadoven in https://github.com/iNavFlight/inav/pull/8363
- Nav landing fixes by @breadoven in https://github.com/iNavFlight/inav/pull/8358
- Waypoint multi-mission in flight mission change by @breadoven in https://github.com/iNavFlight/inav/pull/8354
- Make sure first motorCount outputs get assigned to motor on MR by @mluessi in https://github.com/iNavFlight/inav/pull/8289
- make use of the US2S macro whenever possible by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8331
- [INS] Use Acc and Gyro calibration validation to calibrate the 1G of the acceleration by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8214
- [HITL Mode] Make a "makeup" in the algorithm by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8356
- Enable LEDs by default on JBF7PRO by @nmaggioni in https://github.com/iNavFlight/inav/pull/8412
- iNav to INAV by @DzikuVx in https://github.com/iNavFlight/inav/pull/8410
- set GPS timeout to 2000ms by @stronnag in https://github.com/iNavFlight/inav/pull/8423
- Add landing sensitivity setting + duplicate setting fix by @breadoven in https://github.com/iNavFlight/inav/pull/8427
- fix "Blackbox Internals" encoding and update by @stronnag in https://github.com/iNavFlight/inav/pull/8431
- MSP Displayport by @DzikuVx in https://github.com/iNavFlight/inav/pull/8435
- Mamba f722 wing target by @DzikuVx in https://github.com/iNavFlight/inav/pull/8436
- Add macro data conversion to MPU by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8432
- enable virtual pitot on F411 and F722 by @shota3527 in https://github.com/iNavFlight/inav/pull/8428
- mavlink telemetry half/full duplex support by @RomanLut in https://github.com/iNavFlight/inav/pull/8274
- Throw out all the setup part of the Gyro interrupt routine by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8199
- Allow more applied_defaults by @DzikuVx in https://github.com/iNavFlight/inav/pull/8437
- Disable stick commands if in CLI by @MrD-RC in https://github.com/iNavFlight/inav/pull/8406
- Fix bool values by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8445
- Pass the variable from uint8_t to bool by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8444
- ZEEZF7V3 target by @nmaggioni in https://github.com/iNavFlight/inav/pull/8442
- Add ZeroFArray Macro and make use of it in some parts by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8447
- Rename the LOG function macros by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8446
- Stop showing all LCs for every LC set in dump by @MrD-RC in https://github.com/iNavFlight/inav/pull/8448
- inav->INAV... redo by @DzikuVx in https://github.com/iNavFlight/inav/pull/8468
- Add 2nd PINIO to MATEKF405SE for better use of resources by @MrD-RC in https://github.com/iNavFlight/inav/pull/8438
- Add target KAKUTEF4V23. Support for M5 and M6 outputs. by @marianomd in https://github.com/iNavFlight/inav/pull/8135
- Update virtual pitot to use 3d speed by @shota3527 in https://github.com/iNavFlight/inav/pull/8458
- AHRS centrifugal force compensation by @shota3527 in https://github.com/iNavFlight/inav/pull/8403
- Added support for DJI wtfos MSP-OSD full screen 60x22 OSD by @jeffhendrix in https://github.com/iNavFlight/inav/pull/8434
- New SpeedyBee targets by @DzikuVx in https://github.com/iNavFlight/inav/pull/8478
- Update Github actions version by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8481
- [Displayport MSP] Add Macros by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8480
- Update PixRacer README.md by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8486
- Fix read of DPS310 coef C11 by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8485
- Fix MPU6000 for HAKRCKD722 by @nmaggioni in https://github.com/iNavFlight/inav/pull/8493
- Fix MPU6000 for HAKRCF405D by @nmaggioni in https://github.com/iNavFlight/inav/pull/8492
- Drop IMU2 functionality by @DzikuVx in https://github.com/iNavFlight/inav/pull/8491
- fix lpf config for bmi270/bmi160 by @shota3527 in https://github.com/iNavFlight/inav/pull/8495
- add target aocodarcf4v2 by @dlt2018 in https://github.com/iNavFlight/inav/pull/8416
- Add support HDZero 30x16 mode by @geoffsim in https://github.com/iNavFlight/inav/pull/8476
- Drop some PPM definitions by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8515
- Update gyro orientation for Mamaba H743_2022B by @DzikuVx in https://github.com/iNavFlight/inav/pull/8505
- Kakute H7 V2 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8522
- [target] Clear some unused defitions by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8517
- Added link to "something disabled" wiki by @MrD-RC in https://github.com/iNavFlight/inav/pull/8524
- Fix heading graph on PixelOSD by @MrD-RC in https://github.com/iNavFlight/inav/pull/8526
- [scheduler.c] Remove duplication by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8556
- RTH Trackback - suspend track recording on fixed wing during Loiter by @breadoven in https://github.com/iNavFlight/inav/pull/8512
- Add PINIO 3 & 4 plus MATEKF722PX_PINIO target by @MrD-RC in https://github.com/iNavFlight/inav/pull/8401
- Update ci.yml by @MrD-RC in https://github.com/iNavFlight/inav/pull/8560
- Foxeer F722 V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8544
- Update Battery.md by @MrD-RC in https://github.com/iNavFlight/inav/pull/8559
- [ci] remove remaining instances of ubuntu-18.04 by @stronnag in https://github.com/iNavFlight/inav/pull/8562
- Waypoint turn smoothing and tracking accuracy improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8519
- OSD AHI pitch interval redraw option by @breadoven in https://github.com/iNavFlight/inav/pull/7018
- Correct Omnibus readme by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8573
- Use course over ground as the default for fixed wing navigation "heading" by @breadoven in https://github.com/iNavFlight/inav/pull/8529
- Changed CleanFlight to INAV by @MrD-RC in https://github.com/iNavFlight/inav/pull/8583
- Fix incorrect temperature shown on OSD by @JulioCesarMatias in https://github.com/iNavFlight/inav/pull/8539
- Remove unnecessary parameters from profiles by @MrD-RC in https://github.com/iNavFlight/inav/pull/8451
- Increase nav_wp_safe_distance maximum by @MrD-RC in https://github.com/iNavFlight/inav/pull/8589
- Add EDGE, DELAY, DELTA, APPROX_EQUAL switches and TIMER to Logic Conditions by @MrD-RC in https://github.com/iNavFlight/inav/pull/8581
- Add symbols for remaining time/distance by @MrD-RC in https://github.com/iNavFlight/inav/pull/8584
- Update target AOCODARCF7DUAL and remove MPU6500 by @dlt2018 in https://github.com/iNavFlight/inav/pull/8510
- New debug_mode POS_EST that is useful for autonomous flight by @ricardodeazambuja in https://github.com/iNavFlight/inav/pull/8549
- Foxeer F745AIO V3 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8543
- Change logo size for future enhancements by @MrD-RC in https://github.com/iNavFlight/inav/pull/8585
- Fixed wing Nav altitude control fix by @breadoven in https://github.com/iNavFlight/inav/pull/8590
- OSD Ground Course and Cross Track Error by @breadoven in https://github.com/iNavFlight/inav/pull/8604
- Throttle low clean up by @breadoven in https://github.com/iNavFlight/inav/pull/8601
- Waypoint accuracy tweak by @breadoven in https://github.com/iNavFlight/inav/pull/8620
- Update target.h for AtomRC F405 NAVI by @DzikuVx in https://github.com/iNavFlight/inav/pull/8610
- Stop allowing navigation modes to be active while arming. by @MrD-RC in https://github.com/iNavFlight/inav/pull/8611
- Kakute H7 V2 Invert PINIO2 so VTX is ON by default by @DzikuVx in https://github.com/iNavFlight/inav/pull/8628
- Add a BF4.3 Compatible restricted OSD implementation. by @mmosca in https://github.com/iNavFlight/inav/pull/8631
- Update Navigation.md by @b14ckyy in https://github.com/iNavFlight/inav/pull/8633
- Increase number of voltage digits in BF compatibility mode OSD by @mmosca in https://github.com/iNavFlight/inav/pull/8634
- Be consistent in using #ifdef USE_SAFE_HOME by @sensei-hacker in https://github.com/iNavFlight/inav/pull/8635
- [CLI] add missing arming flag name by @stronnag in https://github.com/iNavFlight/inav/pull/8637
- Fix X8 mode on FoxeerF722V4 by @DzikuVx in https://github.com/iNavFlight/inav/pull/8644
- fixed crsf attitude yaw overflow by @RomanLut in https://github.com/iNavFlight/inav/pull/8638
- changed WP mode priority in crsf telemetry by @RomanLut in https://github.com/iNavFlight/inav/pull/8639
- Nav "Yaw" usage refactor by @breadoven in https://github.com/iNavFlight/inav/pull/8643
- Fix git security issue with docker build by @skeet70 in https://github.com/iNavFlight/inav/pull/8558
- Add more symbols to BF43 translation table. by @mmosca in https://github.com/iNavFlight/inav/pull/8641
- Consolidate post flight and non-essential save calls in to a single save action by @MrD-RC in https://github.com/iNavFlight/inav/pull/8439
- add new target 'AOCODARCF722MINI' by @dlt2018 in https://github.com/iNavFlight/inav/pull/8472
- [doc] document changes introduced by #8446 by @stronnag in https://github.com/iNavFlight/inav/pull/8660
- Fixed wing climb rate fool proofing fix by @breadoven in https://github.com/iNavFlight/inav/pull/8661
- OSD Heading field fix + field display index update by @breadoven in https://github.com/iNavFlight/inav/pull/8624
- Emergency arming simplification by @breadoven in https://github.com/iNavFlight/inav/pull/8659
- use MAX_SUPPORTED_RC_CHANNEL_COUNT instead of hardcoded 16 by @RomanLut in https://github.com/iNavFlight/inav/pull/8676
- Add version info to cliStatus by @OptimusTi in https://github.com/iNavFlight/inav/pull/8671
- Fix Docker build UID/GID mapping by @nmaggioni in https://github.com/iNavFlight/inav/pull/8679
- Unused Baro filter fix by @breadoven in https://github.com/iNavFlight/inav/pull/8688
- DEBUG_ALTITUDE fix by @breadoven in https://github.com/iNavFlight/inav/pull/8693
- RTH Trackback fix by @breadoven in https://github.com/iNavFlight/inav/pull/8697
- Rename functions to avoid confusion why it does not write eeprom by @sakisdog in https://github.com/iNavFlight/inav/pull/8690
- Updates to CLI Outputs by @MrD-RC in https://github.com/iNavFlight/inav/pull/8689
- send value throttle in telemetry exactly as shown on osd by @RomanLut in https://github.com/iNavFlight/inav/pull/8652
- Update RUSH_BLADE_F7 and add RUSH_BLADE_F7_HD targets by @nmaggioni in https://github.com/iNavFlight/inav/pull/8680
- Enhance programming options for waypoint missions by @MrD-RC in https://github.com/iNavFlight/inav/pull/8579
- Update MSPDisplayPort and add Walksnail Avatar settings by @MrD-RC in https://github.com/iNavFlight/inav/pull/8654
- Update Building in Windows with MSYS2.md by @pwnept in https://github.com/iNavFlight/inav/pull/8702
- Change tz_offset min and max by @MrD-RC in https://github.com/iNavFlight/inav/pull/8470
- Use BF SYM_AH_BAR9_4 as replacement for INAV SYM_AH_V_START family in BF Compatibility OSD mode by @mmosca in https://github.com/iNavFlight/inav/pull/8709
- FW Nav Course Hold control method change by @breadoven in https://github.com/iNavFlight/inav/pull/8586
- Disarm on land by default by @DzikuVx in https://github.com/iNavFlight/inav/pull/8711
- Updates in the display of wind estimator by @shota3527 in https://github.com/iNavFlight/inav/pull/8523
- Disable mAh scaling for BF compatibility by @DzikuVx in https://github.com/iNavFlight/inav/pull/8717
- Add RPM symbol translation by @DzikuVx in https://github.com/iNavFlight/inav/pull/8718
- Switch H7 to -Ofast optimizations by @DzikuVx in https://github.com/iNavFlight/inav/pull/8719
- Add strobe overlay to RGB LEDs by @mmosca in https://github.com/iNavFlight/inav/pull/8536
- Add pilot name by @MrD-RC in https://github.com/iNavFlight/inav/pull/8720
- Fixed wing OSD home heading arrow and error fix by @breadoven in https://github.com/iNavFlight/inav/pull/8723
- Fix MATEK F405SE and F722PX targets with PINIO by @MrD-RC in https://github.com/iNavFlight/inav/pull/8728
- Fix build error in osd.c when USE_MSP_DISPLAYPORT is not defined. by @mmosca in https://github.com/iNavFlight/inav/pull/8729
- [Doc] update blackbox.md for 6.0 cli options by @stronnag in https://github.com/iNavFlight/inav/pull/8732
- Landing detector improvements by @breadoven in https://github.com/iNavFlight/inav/pull/8737
- Manual emergency landing FW and MR by @breadoven in https://github.com/iNavFlight/inav/pull/8686
- Correct INAv to INAV by @pwnept in https://github.com/iNavFlight/inav/pull/8746
- add icm42688p support in MATEKF411TE target by @MATEKSYS in https://github.com/iNavFlight/inav/pull/8748
- Landing detection invalid velocity protection by @breadoven in https://github.com/iNavFlight/inav/pull/8743
- Update Flight Mode operand in programming framework by @MrD-RC in https://github.com/iNavFlight/inav/pull/8747
New Contributors
- @gigabytebit made their first contribution in https://github.com/iNavFlight/inav/pull/8088
- @sasodoma made their first contribution in https://github.com/iNavFlight/inav/pull/8071
- @hogthrob made their first contribution in https://github.com/iNavFlight/inav/pull/8149
- @RoadyFPV made their first contribution in https://github.com/iNavFlight/inav/pull/8202
- @pwnept made their first contribution in https://github.com/iNavFlight/inav/pull/8248
- @FinalFrag made their first contribution in https://github.com/iNavFlight/inav/pull/8178
- @shota3527 made their first contribution in https://github.com/iNavFlight/inav/pull/8428
- @marianomd made their first contribution in https://github.com/iNavFlight/inav/pull/8135
- @ricardodeazambuja made their first contribution in https://github.com/iNavFlight/inav/pull/8549
- @mmosca made their first contribution in https://github.com/iNavFlight/inav/pull/8631
- @b14ckyy made their first contribution in https://github.com/iNavFlight/inav/pull/8633
- @skeet70 made their first contribution in https://github.com/iNavFlight/inav/pull/8558
- @sakisdog made their first contribution in https://github.com/iNavFlight/inav/pull/8690
- @WizzX-FPV made their first contribution in https://github.com/iNavFlight/inav/pull/8811
- @YI-BOYANG made their first contribution in https://github.com/iNavFlight/inav/pull/8570
Full Changelog: https://github.com/iNavFlight/inav/compare/5.1.0...6.0.0