Camera Calibration API Save
A simple Python API for single camera calibration using opencv
camera_calibration_API
A repository containing the camera calibration API
Repository Overview:
camera_calibration.py:contains an API which tries to minic the MATLAB's camera calibration app functionality. This API is a thin wrapper around the opencv's camera calibration functionalities.
examples: A directory containing various examples
Camera_Calibration_API:
Introduction:
The Camera Calibration API is a wrapper around the opencv's camera calibration functionalities. This tries to mimic the MATLAB camera calibration app's functionality in python. The API supports all the 3 calibration patterns supported by opencv namely: Chessboards, Asymmetric circular grids and Symmetric circular grids. The API by default runs on 4 threads for speedup. The speed-up may not be marginal in the case of chessboard calibration because in most cases the bottle neck will be a single chessboard image (run on a single core) which the algorithm takes time to detect.
Dependencies:
-
works in both python-3 and python-2 -
opencv (Tested in version 3.3.0) -
numpy -
matplotlib -
pickle -
argparse -
glob -
pickle -
multiprocessing -
os -
pandas
Example:
Examples to use the Camera_Calibration_API() for calibration using chessboard, symmetric circular grids and asymmetric circular grids can be found in the example_notebooks folder
Features:
- Supports all the 3 calibration patterns supported by opencv : Chessboards, Asymmetric circular grids and Symmetric circular grids.
- Additionally a custom calibration pattern can also be implemented. (Look at the next section for how to calibrate using custom pattern.)
- Visualizes the Reprojection error plot
- Ability to Recalibrate the camera by neglecting the images with very high reprojection errors.
-
Camera centric and Pattern centric views can be visualized using the
visualize_calibration_boardsmethod after calibration. -
Blob detection parametersfor detecting asymmetric and symmetric circular grids can be accessed and modified via the Camera_Calibration_API's object prior to calling thecalibrate_cameramethod - Also has
terminalsupport with minimal control on the variables. Use it as an importable module for better control over the variables - Can also be easily extended to support other unimplemented calibration patterns
Using custom calibration board with the Camera_Calibration_API.
So you want to extend the API for a custom calibration pattern? Well... OK! Just follow the follow the steps below
- The
calibrate_cameraaccepts two additional arguments calledcustom_world_points_functionandcustom_image_points_function. - You must implement the above two custom methods and pass it as an argument to the
calibrate_cameramethod
custom_world_points_function(pattern_rows,pattern_columns):
- This function is responsible for calculating the 3-D world points of the given custom calibration pattern.
- Should take in two keyword arguments in the following order: Number of rows in pattern(int), Number of columns in pattern(int)
- Must return only a single numpy array of shape (M,3) and type np.float32 or np.float64 with M being the number of control points of the custom calibration pattern. The last column of the array (z axis) should be an array of 0
- The distance_in_world_units is not multiplied in this case. Hence, account for that inside the function before returning
- The world points must be ordered in this specific order : row by row, left to right in every row
custom_image_points_function(img,pattern_rows,pattern_columns):
- This function is responsible for finding the 2-D image points from the custom calibration image.
- Should take in 3 keyword arguments in the following order: image(numpy array),Number of rows in pattern(int), Number of columns in pattern(int)
- This must return 2 variables: return_value, image_points
- The first one is a boolean Representing whether all the control points in the calibration images are found
- The second one is a numpy array of shape (N,2) of type np.float32 containing the pixel coordinates or the image points of the control points. where N is the number of control points.
- This function should return True only if all the control points are detected (M = N)
- If all the control points are not detected, fillup the 2-D numpy array with 0s entirely and return with bool == False.
- The custom image points must be ordered in this specific order: : row by row, left to right in every row
NOTE: 'Custom' pattern is not supported when accessed from terminal
Supported Calibration patterns (rows x columns) bydefault:
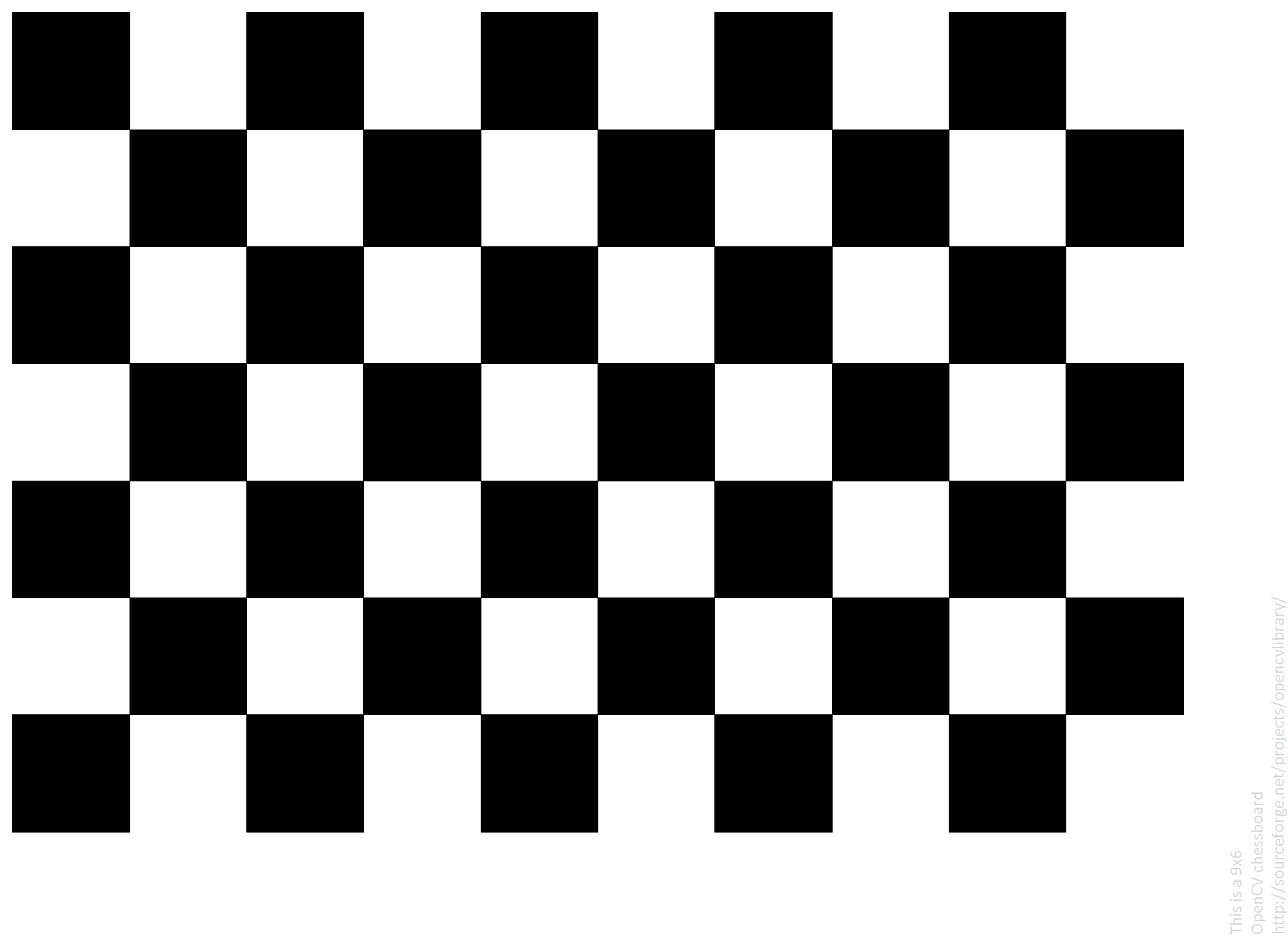
Chessboard or Checkerboard pattern (6 x 9):
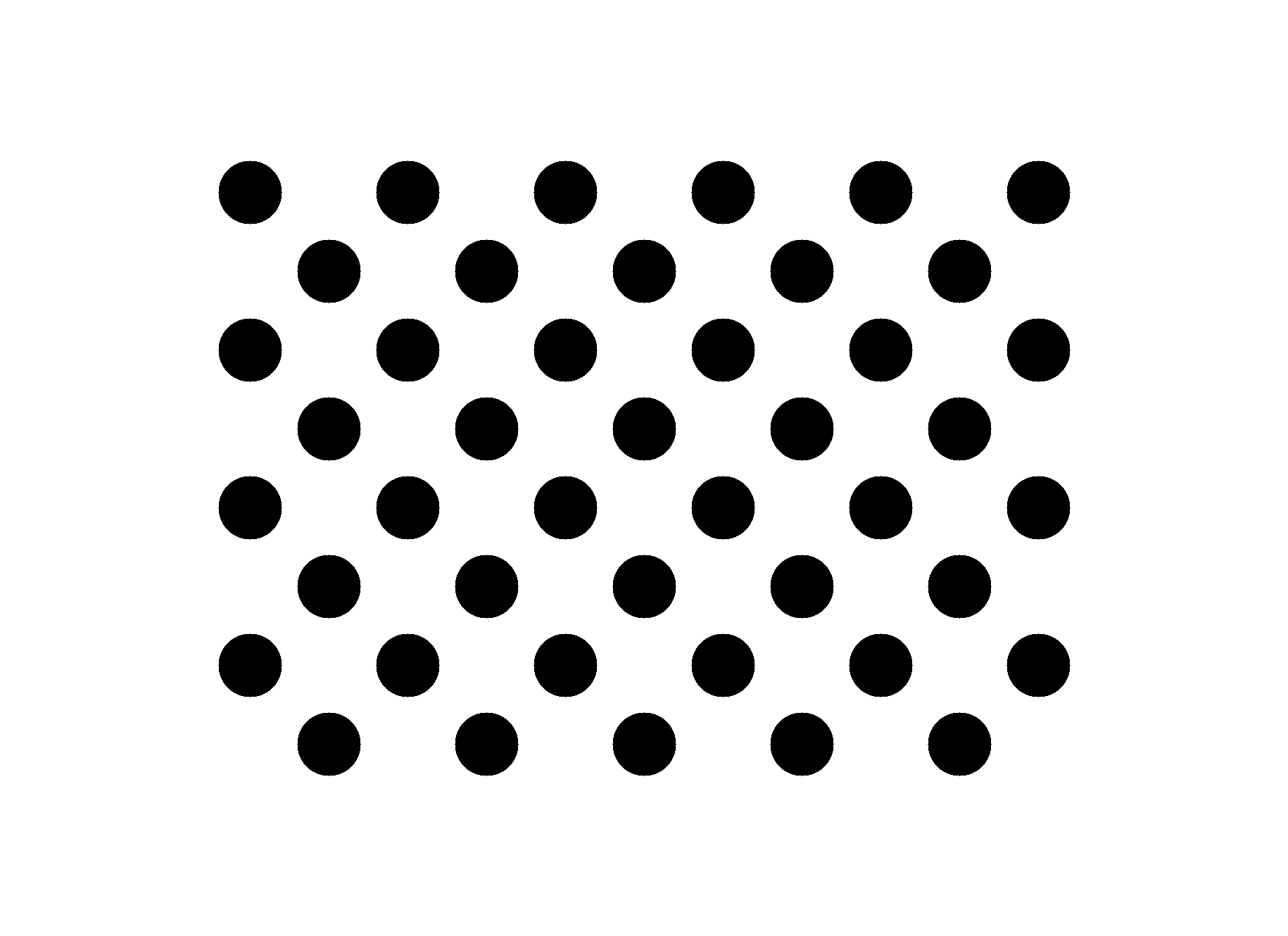
Asymmetrical circular grid/pattern (4 x 11):
 .
.
NOTE for calibrating using Asymmetric circular grid:
-
The code assumes that each asymmetric circle is placed at half the
distance_in_world_unitsin both (x,y) from each other. -
The
distance_in_world_unitsis specified as the distance between 2 adjacent circle centers at the same y coordinate -
The above is a 4 x 11 (r x c) asymmetrical circular grid.
-
If you are using the same orientation as the above, Then this orientation is termed as double_count_in_column which is by default set to
True. -
If you are using an orientation which is 90deg to the above orientation 11 x 4 (r x c) then the
double countis along the rows. In this case, setobject.double_count_in_column = Falseprior to callingobject.calibrate_cameramethod.
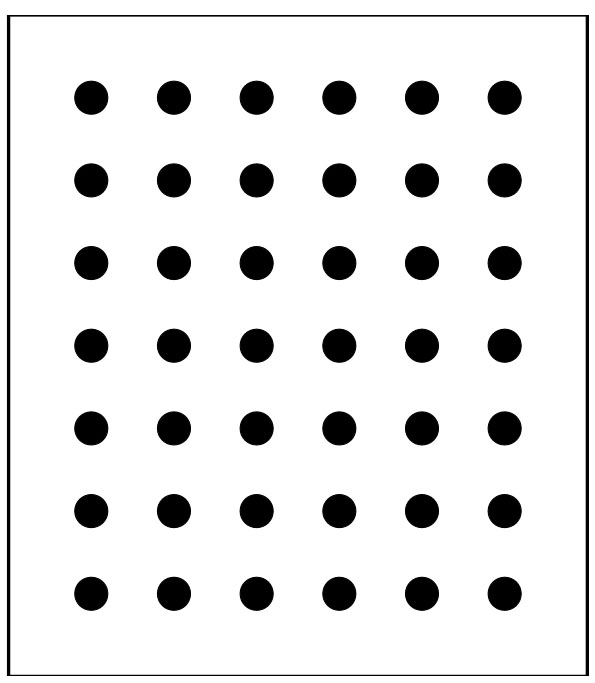
Symmetric circular grid/pattern (7 x 6):